A Wheel based Stair Climbing Robot with Hopping Mechanism
From the viewpoint of mobility on rough terrain, such as off-road transport or negotiating stairs in an office environment, many mechanisms for robot motion have been proposed and developed.
A wheel-type vehicle can move quickly and stably, but cannot overcome obstacles higher than its wheel radius.
A crawler-type vehicle can overcome a certain degree of rough terrain, but is noisy and slow.
A legged-type vehicle can climb over higher obstacles than other types of vehicles, but the control of these vehicles is extremely complex and their speed is not continuous.
Although hybrids of these mechanisms or a robot composed of several bodies, such as snake robot, have been proposed, most are not practical for simple operations, such as surveillance in an office, because of high costs. Meanwhile, living creatures, including tiny insects for example, use jumping or hopping for obstacle avoidance, as well as for fast travel.
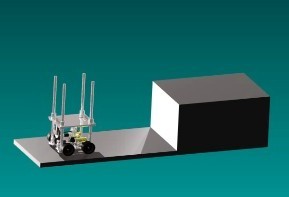
Based on these considerations, we propose a simple hopping mechanism using the vibration of a 2-DOF system to develop a fast wheel-based stair-climbing robot. The robot consists of two bodies connected by springs and a wire and hops by releasing energy stored in the springs. The trajectories of the bodies during hopping change in accordance with design parameters such as the reduced mass of the two bodies, the mass ratio between the upper and lower bodies and the spring constant, and the control parameters such as the initial contraction of the spring and the wire tension. This property allows for fast (0.5 seconds/step) and economic (energy-saving) stair climbing, and landing softly (almost 0 Gravity). Additionally, this small (33cm-height) robot negotiates the step with 2/3 of own height (22 cm). In this study, we analyze the characteristics during the hopping motion for the design and control parameters by both numerical simulations and experiments, and demonstrate fast movement, hopping up steps and soft landings using own dynamic characteristics.
Related Papers:
.Koki Kikuchi, Keisuke Sakaguchi, Takayuki Sudo, Naoki Bushida, Yasuhiro Chiba, and Yuji Asai, A study on wheel-based stair-climbing robot with hopping mechanism, MECHANICAL SYSTEMS AND SIGNAL PROCESSING(MSSP), ELSEVIER, Vol.22, Issue 6, 1316-1326, (2008-8), (Full paper).
.Akira KAMEI, Masaya JINNO, Naoya CHISHIMA, Kenji SATO, and Koki KIKUCHI, Soft Landing Condition for Stair-Climbing Robot with Hopping Mechanism, JSDE, The 3rd International Conference on Design Engineering and Science: ICDES2014, (Sep. 2014), Pilsen, Czech Republic, Vol.1, pp.122-127.
Based on these considerations, we propose a simple hopping mechanism using the vibration of a 2-DOF system to develop a fast wheel-based stair-climbing robot. The robot consists of two bodies connected by springs and a wire and hops by releasing energy stored in the springs. The trajectories of the bodies during hopping change in accordance with design parameters such as the reduced mass of the two bodies, the mass ratio between the upper and lower bodies and the spring constant, and the control parameters such as the initial contraction of the spring and the wire tension. This property allows for fast (0.5 seconds/step) and economic (energy-saving) stair climbing, and landing softly (almost 0 Gravity). Additionally, this small (33cm-height) robot negotiates the step with 2/3 of own height (22 cm). In this study, we analyze the characteristics during the hopping motion for the design and control parameters by both numerical simulations and experiments, and demonstrate fast movement, hopping up steps and soft landings using own dynamic characteristics.
Related Papers:
.Koki Kikuchi, Keisuke Sakaguchi, Takayuki Sudo, Naoki Bushida, Yasuhiro Chiba, and Yuji Asai, A study on wheel-based stair-climbing robot with hopping mechanism, MECHANICAL SYSTEMS AND SIGNAL PROCESSING(MSSP), ELSEVIER, Vol.22, Issue 6, 1316-1326, (2008-8), (Full paper).
.Akira KAMEI, Masaya JINNO, Naoya CHISHIMA, Kenji SATO, and Koki KIKUCHI, Soft Landing Condition for Stair-Climbing Robot with Hopping Mechanism, JSDE, The 3rd International Conference on Design Engineering and Science: ICDES2014, (Sep. 2014), Pilsen, Czech Republic, Vol.1, pp.122-127.
 |
Numerical Simulations |
 |
CAD Models |
 |
Hardwares |
 |
Demonstration |