The Department of Advanced Robotics, Chiba Institute of Technology:
>> jump to japanese
Welcome to KIKUCHI Lab.
About us
Research
Activities
People
Lab. instruments
Location
Contact
For members
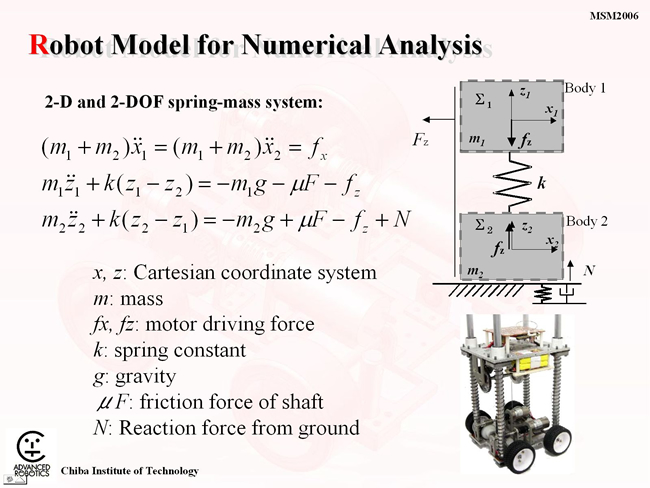
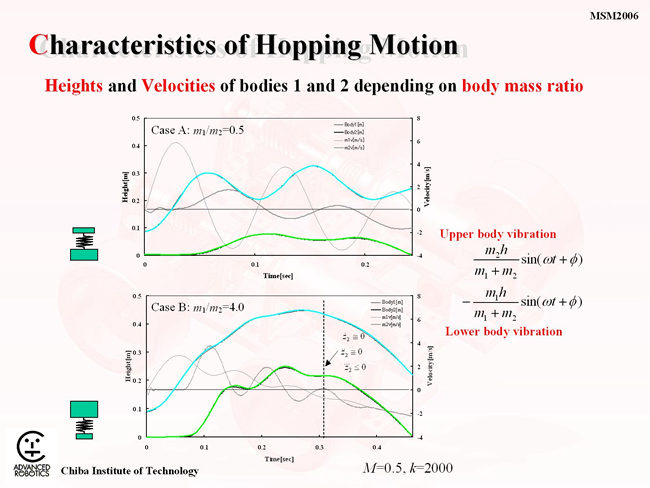
A Wheel based Stair Climbing Robot with Hopping Mechanism: Numerical Simulations
.Equations of motion
.Body trajectories depending on upper and lower mass ratio
© K.Kikuchi <Kikuchi Laboratory> - Since April 2004