About Us
Kikuchi Lab. (Morphology/Intelligence Lab.) has been established in April 2001 as "Robotics" laboratory of the department of Precision Engineering in Chiba Institute of Technolgoy (CIT), then has moved to the department of Mechanical Science and Engineering in April 2003, and has belonged to the department of Advanced Robotics since April 2006.
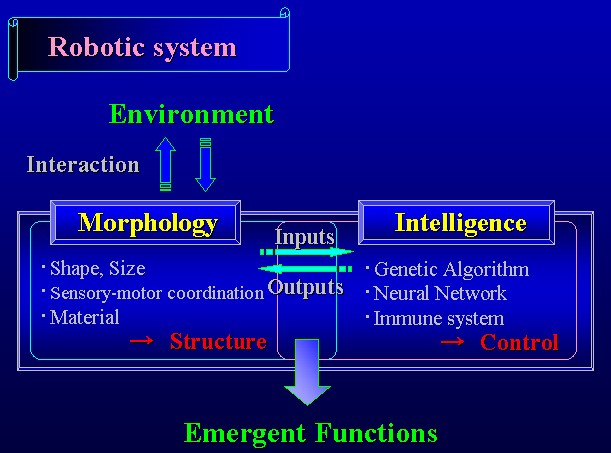
In an autonomous mobile robot, it is important to design whole system created by balance of "morphology" (structural system such as shape, scale, rigidity and surface color) and "intelligence" (control system such as relationship between sensor inputs and actuator outputs) and additionally new "functions" emerge from interplay between such system and environments. From this point of view, we are studying a robotic system which evolves by reconfiguring both morphology and intelligence, a hopping robot which climbs up stairs using vibrations of simple 2-DOF body structure, a butterfly-style flapping robot with total weight of 0.5 g and wingspan of 10 cm, and an on-water running robot.
In an autonomous mobile robot, it is important to design whole system created by balance of "morphology" (structural system such as shape, scale, rigidity and surface color) and "intelligence" (control system such as relationship between sensor inputs and actuator outputs) and additionally new "functions" emerge from interplay between such system and environments. From this point of view, we are studying a robotic system which evolves by reconfiguring both morphology and intelligence, a hopping robot which climbs up stairs using vibrations of simple 2-DOF body structure, a butterfly-style flapping robot with total weight of 0.5 g and wingspan of 10 cm, and an on-water running robot.