地下高気圧狭隘空間における掘削重機の自動運転システムに関する研究

ニューマチックケーソン工法は圧縮空気を利用して地下深くに
橋脚基礎や地下貯水池などを建設する工法です.
本工法には作業者の健康被害の問題などが存在します.
それらの解消のため高気圧かつ狭い地下空間で
動作する自動掘削システムを開発しています.
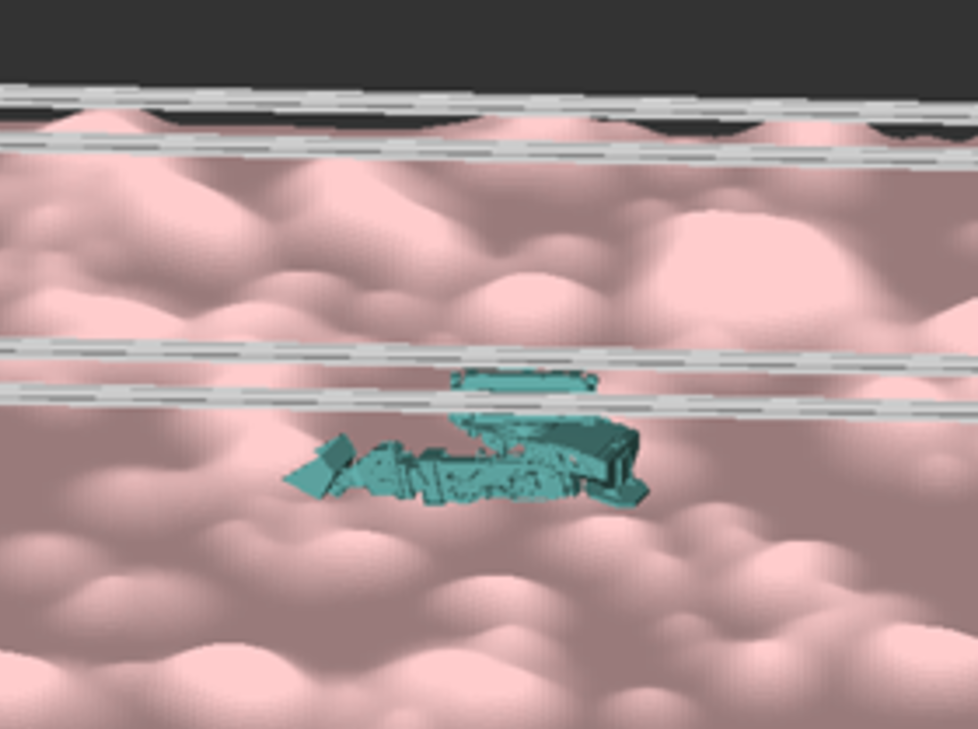
シミュレーションによる運動特性評価
実際の作業環境と掘削重機を再現したシミュレータを使用し,掘削軌跡やショベルの移動性能の評価を行っています.
1台の掘削重機による地形形状に応じた掘削手法
1/10モデルによる検証実験
実機による自動運転システムの検証は金銭面などから困難です.
掘削重機を1/10サイズにスケールダウンした掘削ロボットによる検証を行います.
複数台の掘削重機による協調作業の実現
Lorem ipsum dolor sit amet, at mei dolore tritani repudiandae. In his nemore temporibus consequuntur, vim ad prima vivendum consetetur. Viderer feugiat at pro, mea aperiam
バケツリレーによる掘削土の運搬
掘削量推定アルゴリズムによる率のよい作業を可能にする
排土アルゴリズム
衝突回避システム
対レールの掘削重機同士が衝突の可能性を算出して回避動作
1/10テストプラットフォームの開発および検証実験
掘削土砂搬出システムの開発
地下深くから地上に掘削土砂を搬出する際の機構を1/10プラットフォームに再現
1/10モデルを使用した検証実験
シミュレーションで開発したシステムを実際に土を掘削させる検証実験