コンテンツへスキップ
菊池研究室
研究室概要
研究グループ一覧
論文・著書
関連記事
メンバー
設備関連
年間行事
授業
リンク
メンバー専用
研究室概要
研究グループ一覧
論文・著書
関連記事
メンバー
設備関連
年間行事
授業
リンク
メンバー専用
研究内容
▼研究内容
当研究室で行っている研究内容です。
テーマ別に分かれてますので、そのテーマ名をクリックしてください。
・2自由度振動系を利用した高速階段昇降に関する研究
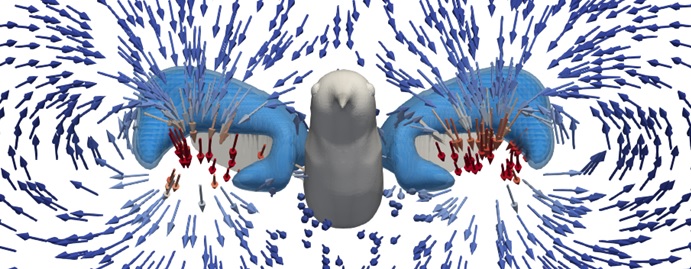
・蝶を規範とした小型はばたきロボットに関する研究
・小型4足歩行ロボット開発
・地下高気圧狭隘空間における掘削重機の自動運転システムの開発
・水空移動ロボット
・流体移動メカニズム
・過去の研究