The Department of Advanced Robotics, Chiba Institute of Technology:
>> jump to Japanese
Lab. Instruments
(1) – Hardwares –
.3-D highspeed camera system(DITECT, HAS-220: 200fps, 400fps, 504pixels*243pixels, 1/10,000sec -3 sets- )
.Highspeed camera (DITECT, HAS-500, 500fps:1,024pixels*992pixels – 4,000fps:256pixels*112pixels, 1/500,000sec -2 sets-)
.3-D highspeed camera system (DITECT, HAS-D3, 480fps:1,696*1,710pixels – 10,000fps:320*240pixels -3 sets-)
.Parallel computing system (Core i7, 2.8GHz, 1GMemory, Linux, * 32)
.Rapid prototyping(Unirapid, Unirapid II: Layer0.05mm,150mm*150mm*150mm)
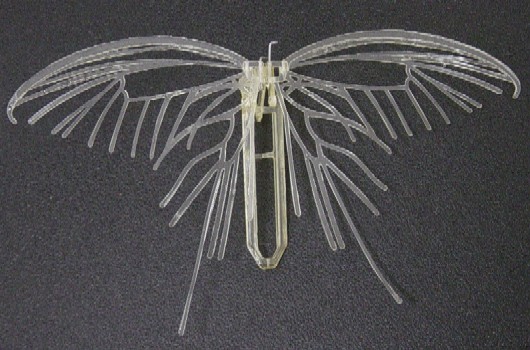
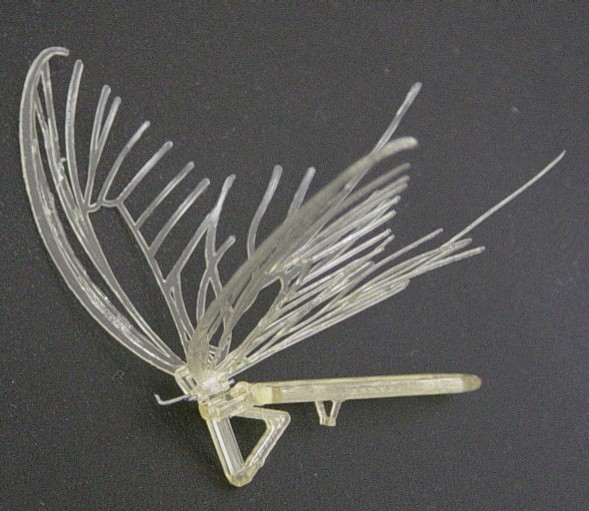





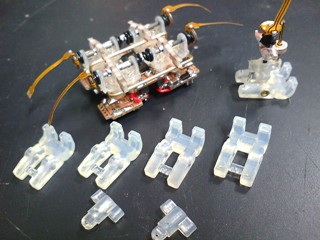

Examples of molding
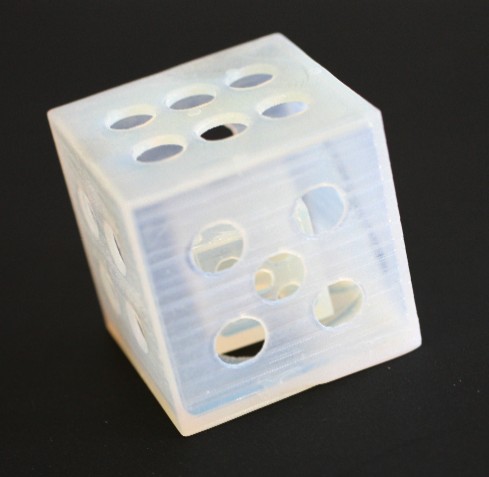
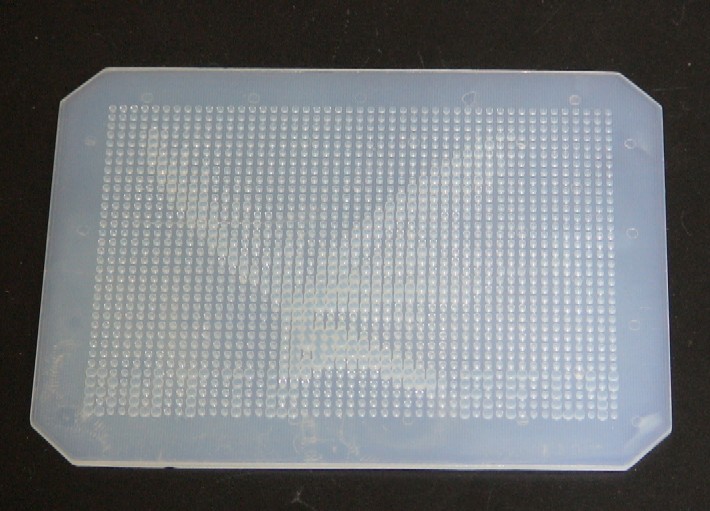
.3D printer (uPRINT: W660×D670×H800, Layer0.254mm )
Examples
.3D printer (MITS: M3DS-100)
.Small machining center (MP-150A-HP,CANON ELECTRONICS INC.:150mm*150mm*100mm)


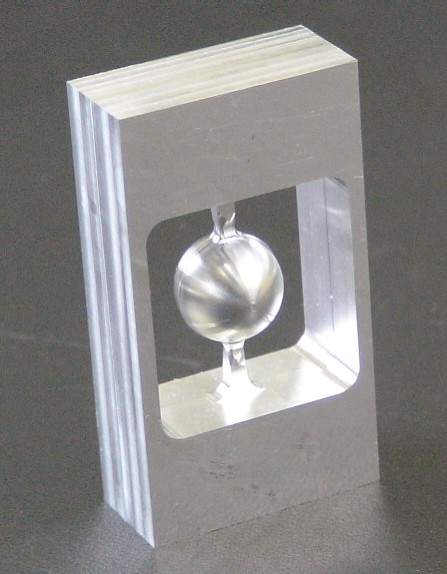
.Machine tools (Bench type milling machine, Bench lathe, Bench drilling machine, Band saw)
.Prototyping printed board making system (LPKF Japan Co., Ltd.: ProtoMatC40E)
(2) – Softwares –
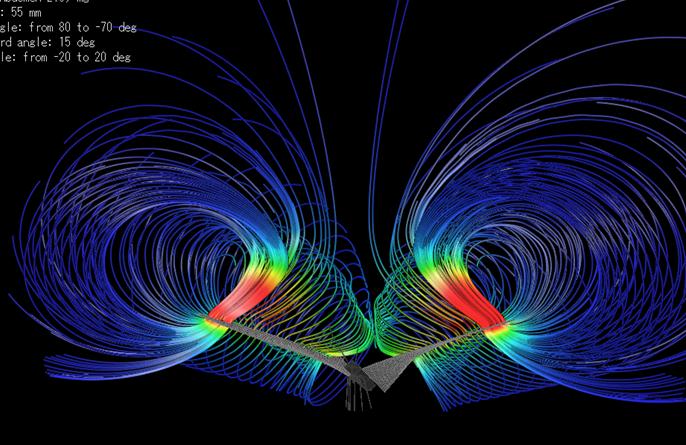
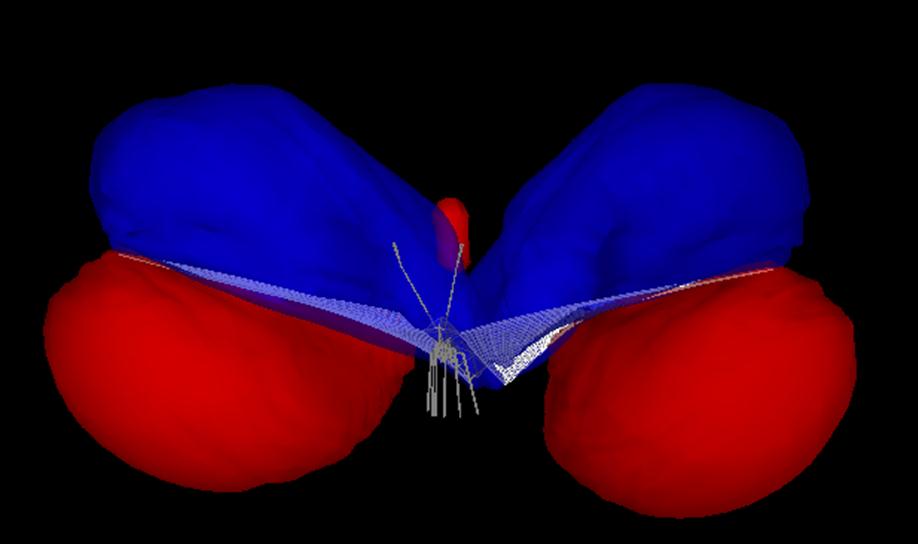
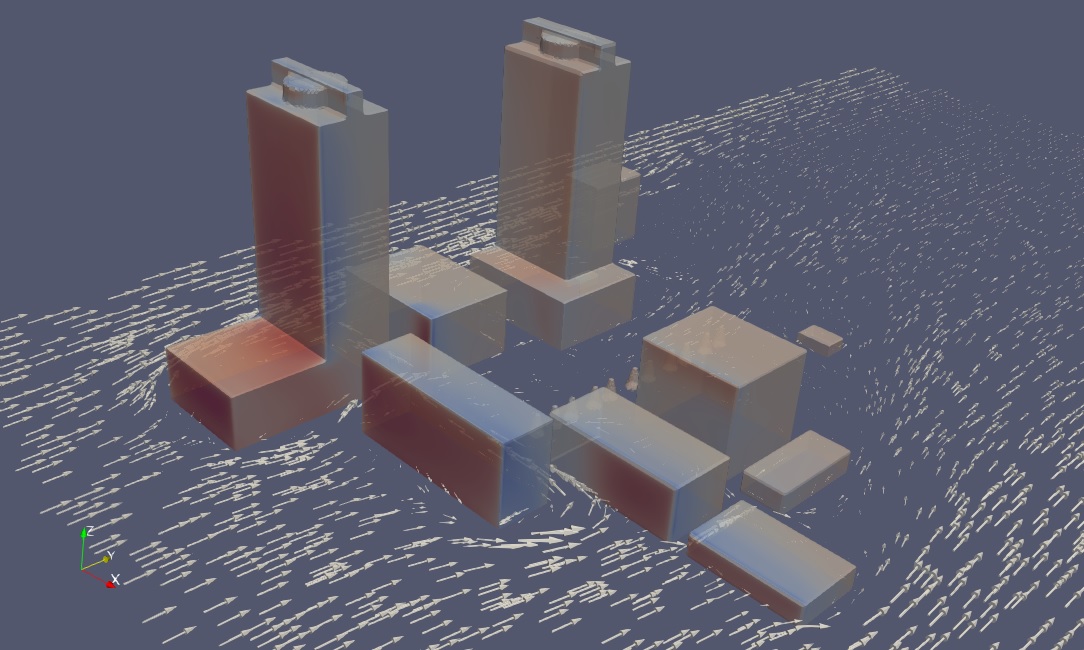
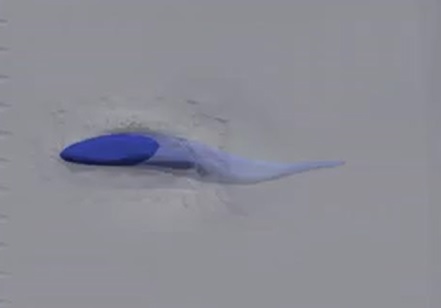
.Visualization software (KGT, MicroAVS ver.20, paraView)
.CAD (Autodesk Inventor)
.Compiler (BCC++, VCC++, Assemblers for H8 and PIC)
.CFD (openFOAM)
© K.Kikuchi <Kikuchi Laboratory> – Since April 2004