▼尺取虫型ロボット開発
倒壊現場のような不整地では,安定性の観点から匍匐による移動が有効な手段の一つである.そこで本研究では,
出力質量比の高い形状記憶合金ファイバー(SMAF)をアクチュエータに使用した,小型尺取虫型ロボットの開発を行う.
.jpg)
◆Yanagihori model (2011).
8.0 × 1.7 × 1.5 [cm]
2.5 g
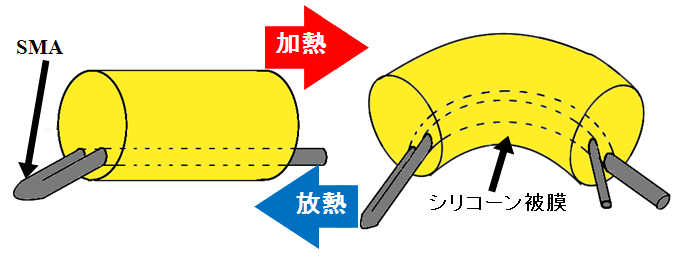
ロボットは上下方向の運動を行い,脚先の異方性によって前進する.また,SMAFを柔軟性の高いシリコーンで覆うことにより,アクチュエータの直動動作を
屈曲動作に変換している.
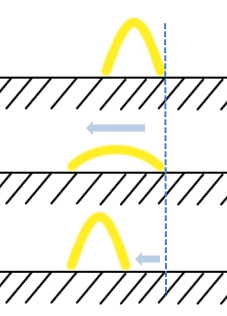 匍匐運動 |
 ボディの動作 |