▼ジャンプロボット
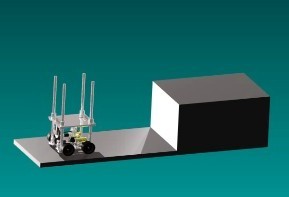
移動ロボットに必要とされる機能の一つに不整地の踏破性が挙げられる. オフィスや災害地,小惑星など,従来の移動ロボットでは走行が困難な場所では,不整地の踏破性を備えた移動ロボットが必要不可欠である.従来の移動ロボットは車輪駆動や脚型,クローラ型が主だが不整地の踏破性という面でそれぞれを見ると多くの欠点がある, そこで本研究では,単純な2自由度振動系を利用した移動ロボットを提案し,車輪駆動で高速かつ着地点での衝撃が小さい階段昇降の可能性を検討する.
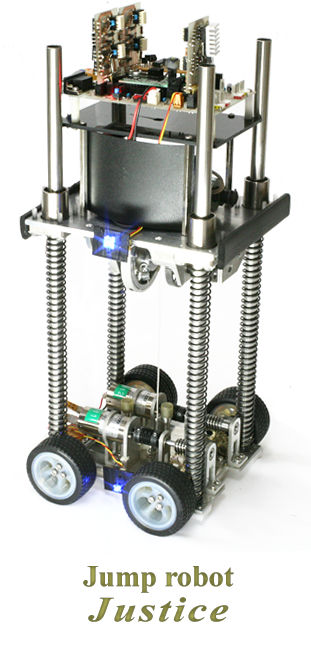
▼ロボットの機構
本研究で提案するロボットは,ワイヤと4本のばねによって結合された上部ボディ (Body1) と下部ボディ(Body2) の2自由度振動系から成る.上部ボディは,レシーバ,ギア,巻き取りモータ,ソレノイド,バッテリ,これらを制御するCPUから成る.下部ボディは移動するための2つの駆動用モータ,4輪タイヤ,4本の支柱,距離センサ,および衝撃加速度測定用の前後2つの加速度センサから成る.ロボットは,上部ボディ内の巻き取り機構を用いてワイヤを巻き取り,ばねを縮めることで跳躍するためのエネルギを蓄え,ソレノイドを用いて巻き取り機構を切り離し,蓄えられたエネルギを解放することで跳躍する.
このロボットは,Body2の車輪機構により平面において安定した高速移動を可能である. また,バネの振動を利用した単純な跳躍機構を有しており,この振動特性から着地時の衝撃が小さい着地(ソフトランディング)を行うことができる.
 |
数値シミュレーション |
|
 |
CADモデル | |
 |
ハードウェア | |
 |
実験 |