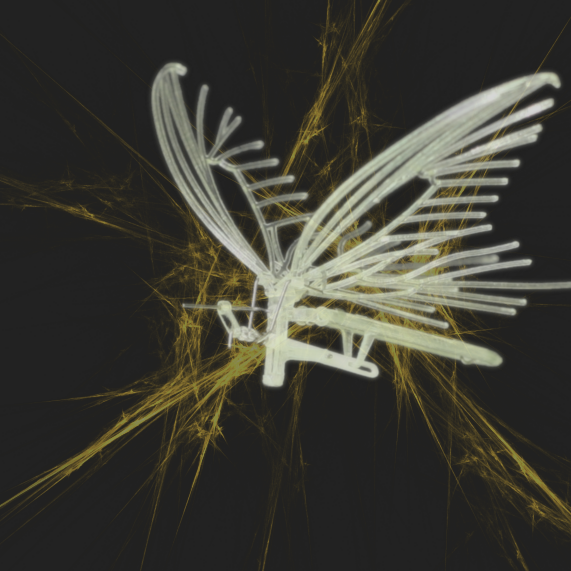
We develop a butterfly-style flapping robot with a wingspan of 10 cm and a mass of 0.5 g and a hummingbird robot capable of hovering.

We try to construct a large/deep underground space using many excavation robots.

We research and propose new locomotion mechanisms: taxiing of flying fish, direct takeoff of diving beetle, and on-water running of basilisk.

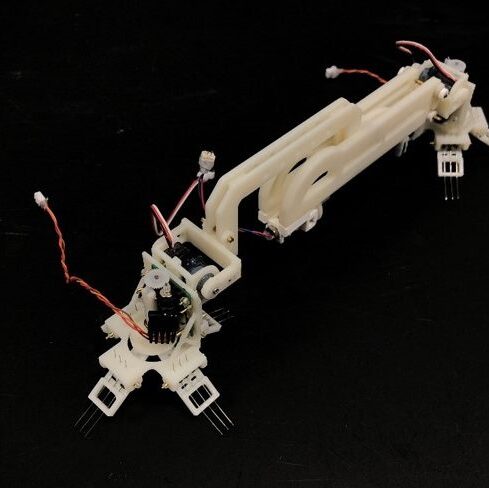
We use physical scale characteristics and realize wall-climbing, 10G dash, on-water running .
Address:
Tsudanuma Campus: 2-17-1 Tsudanuma, Narashino, Chiba, 275-0016, Japan
Transportation:
(1) Tsudanuma Station (JR Soubu Line): 28 minutes from Tokyo station / 3 minutes from Tudasuma station by walk.
(2) Keisei Tsudanuma Station (Keisei Line): 37 minutes from Keisei Ueno station / 12 minutes from Keisei Tsudanuma Station by walk.
(3) Shin Tsudanuma Station (Shin Keisei Line) / 5 minutes from Shin Tsudanuma station by walk.
Map: