“Small” is convenient for locomotion counteracting gravity, such as vertical wall climbing, upside-down locomotion on the ceiling, on-water running, and so on, because of scaling effect which own weight decreases in proportion to the cubed of the length. We are developing various small locomotion mechanism.
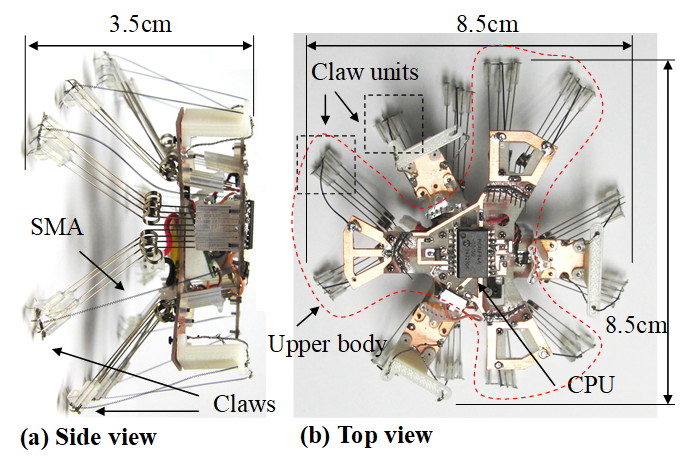
Crow-style locomotion (Kawasaki the 1st model 2013):
The robot has two mechanisms, one above and one below, each with three legs including two claws, and climbs the vertical wall by tripod gait. It can climb the wall with many small holes like a concrete wall, however cannot climb the wall with the small convex like bumps.

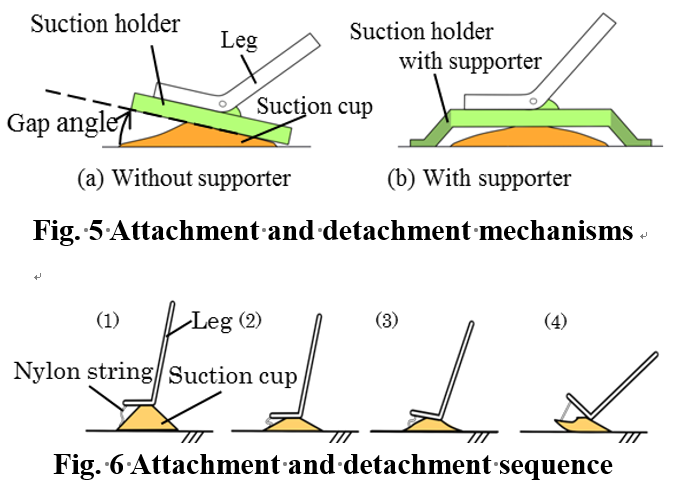
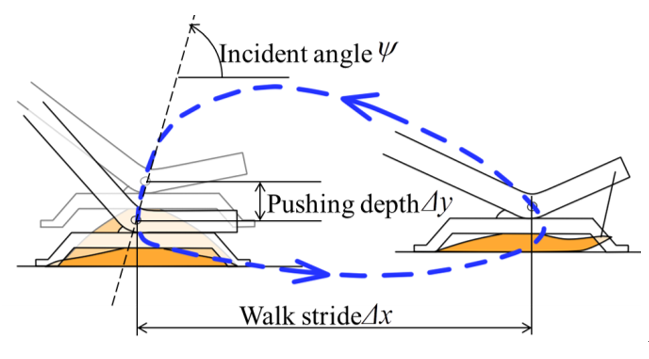
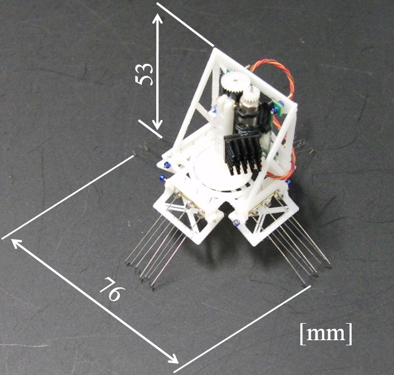
Suction cup model (Kawasaki the 2nd model 2013):
To climb the vertical wall, the pushing force to attach the wall must be less than the peeling force to detach the wall. The combination of the leg trajectory and the attitude created by the linkage mechanism generates such motion like gecko (left). The middle video shows the direction change of gecko. The right shows the fall.
Inchworm-style model (Funatsu model 2014)
Wall climbing insects (2021)
Ants can climb on various types of walls. But, while beetles can climb the concave wall, they cannot climb the convex wall
References:
. Mayo Funatsu, Yushi Kawasaki, Soichiro Kawasaki, Koki Kikuchi: DEVELOPMENT OF cm-SCALE WALL CLIMBING HEXAPOD ROBOT WITH CLAWS,MM (Modern Machinery) Science Journal, October 2014, pp.484-489, (2014).DOI: 10.17973/MMSJ.2014_10_201411, (Translated paper: Recommended by ICDES2014).
. Soichiro Kawasaki and Koki KIKUCHI, Development of Legged Wall Climbing Robot using Passive Suction Cups, JSDE, The 3rd International Conference on Design Engineering and Science: ICDES2014, (Sep. 2014), Pilsen, Czech Republic, Vol.2, pp.112-116.