A stair-climbing robot consisting of upper and lower bodies connected by springs moves using wheels and hops using the 2-DOF spring-mass system. When the frequency of vibration satisfies the condition of the period of stairs, the robot climbs the stairs quickly without the landing impact.
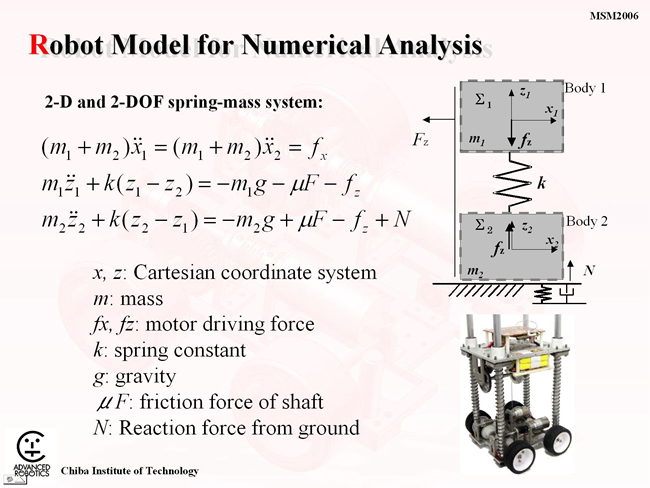
Upper mass point (x1, z1, m1) and lower mass point (x2, z2, m2) are connected by spring (k), vibrate vertically and move horizontally by the wheels of the lower body. Let the thrust force, the wire force for the clutch, and the friction be fx, fz, and myu*F respectively, the equations of motion are given by:
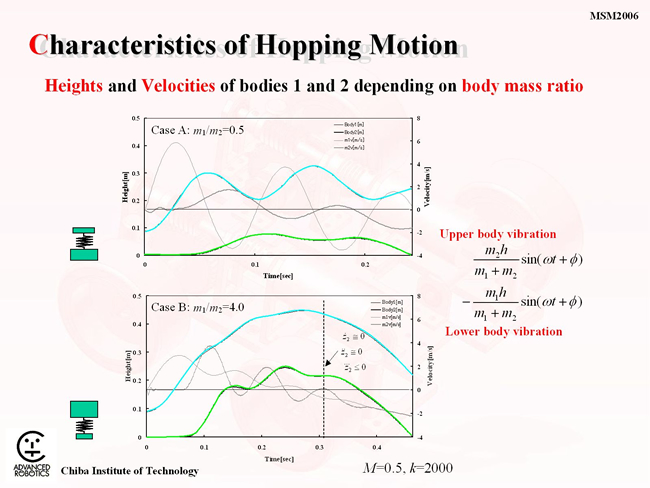
The figures show the typical motion trajectories of Case A: the upper is light and the lower is heavy (above) and Case B is vice versa (below). The characteristic combination of the motion parameters creates “the soft landing point” that the lower point is a certain height (z2=H), the vertical velocity is zero (z2’=0), the acceleration is zero (z2”=0), and the jerk is negative (z2”'<0). If the stair riser corresponds to the height (H), the system lands without impact acceleration. Additionally, if the frequency of the system ( (k/m)^0.5 ) harmonize with the stair riser to tread ratio, the system climbs the stairs quickly at low energy cost.

References:
. Koki KIKUCHI, Masafumi MIURA, Kyosuke SHIBATA and Junpei YAMAMURA: Soft Landing Condition for Stair-climbing Robot with Hopping Mechanism (Feasibility Discussion for Multiple Soft Landing Points),JSDE, J-STAGE (2018), No.8, Vol.53, pp.605-614, (Resubmitted paper from ICDES2017).
. Koki Kikuchi, Keisuke Sakaguchi, Takayuki Sudo, Naoki Bushida, Yasuhiro Chiba, and Yuji Asai, A study on wheel-based stair-climbing robot with hopping mechanism, MECHANICAL SYSTEMS AND SIGNAL PROCESSING(MSSP), ELSEVIER, Vol.22, Issue 6, 1316-1326, (2008-8), (Full paper).
. Yuji Asai, Yasuhiro Chiba, Keisuke Sakaguchi, Takayuki Sudo, Naoki Bushida, Hiroshi Otsuka, Yusuke Saito, and Koki Kikuchi , Wheel-Based Stair-climbing Robot with Hopping Mechanism – Demonstration of Continuous Stair Climbing Using Vibration – ,JSME , Journal of Robotics and Mechatronics,Vol.20, No.2, pp.221-227, (2008-4).
. Keisuke Sakaguchi, Takayuki Sudo, Naoki Bushida, Yasuhiro Chiba, Yuji Asai and Koki Kikuchi, Wheel-Based Stair-climbing Robot with Hopping Mechanism – Fast Stair-climbing and Soft-landing by Vibration of 2-DOF system – ,JSME , Journal of Robotics and Mechatronics, Vol.19, No.3, pp.258-263, (2007-6)