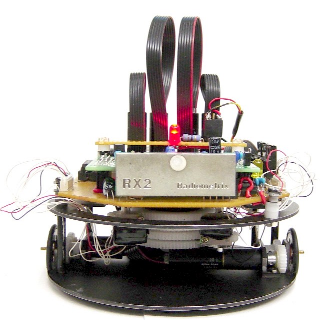
Evolutionary Robot by Generic Programming (1998)
The robot automatically creates the body morphology consisting of multi-cells and the intelligence by sensory-motor coordination using GP. Task is to collect the five blue objects to the red circle within n seconds.
Evolutionary Robot by Genetic Programming (1994-2012):

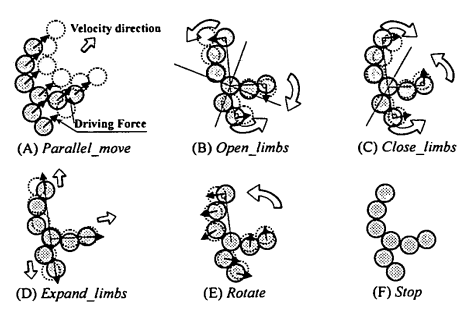
Shibano model (2012)
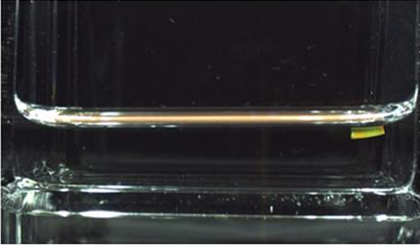
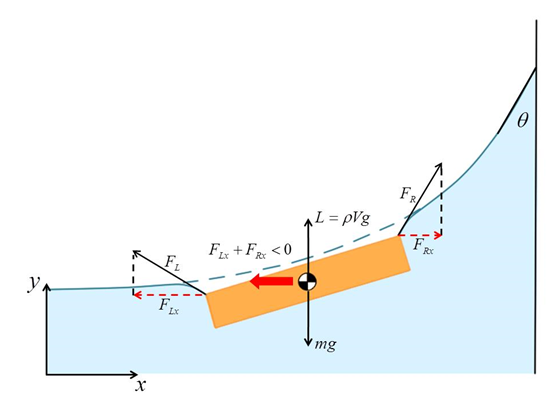
Meniscus wall climbing by Gel (2012-2016):
. Kohki KIKUCHI and Fumio HARA, “A Study on Evolutionary Design in Balancing Morphology and Intelligence of Robotic Systems “, JSME, Journal of Robotics and Mechatronics, Vol.12, No.2, (2000), pp.180-189.
. Yusuke Hara, Mami Saiki, Koki Kikuchi, et al.: A Meniscus-Climbing Gel Robot, Chemistry Letters,Vol.43, No.6, pp.938-940, (2014).