Stable hovering of humming birds is very convenient for inspection using RGBD cameras because the image does not blur. We try to clarify the flapping mechanism focusing on the lead-lag/feathering motion, spanwise-twisting, stroke plane, and tip trajectory and apply to an observation robot replacing multi-copters.
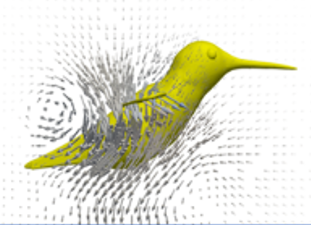
Pressure contour of hovering by FSI simulation (Takitsu model):
CFD: Incompressible, overset mesh, moving boundary condition
Structure: multibody model
Motion: flapping freq. of ** Hz
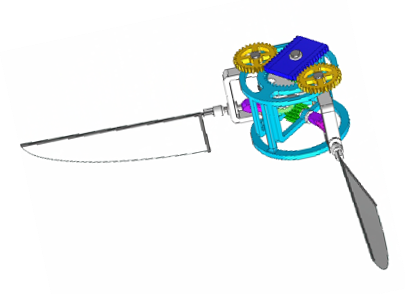
CAD model for one-DOF flapping/feathering mechanism (Mihara model):