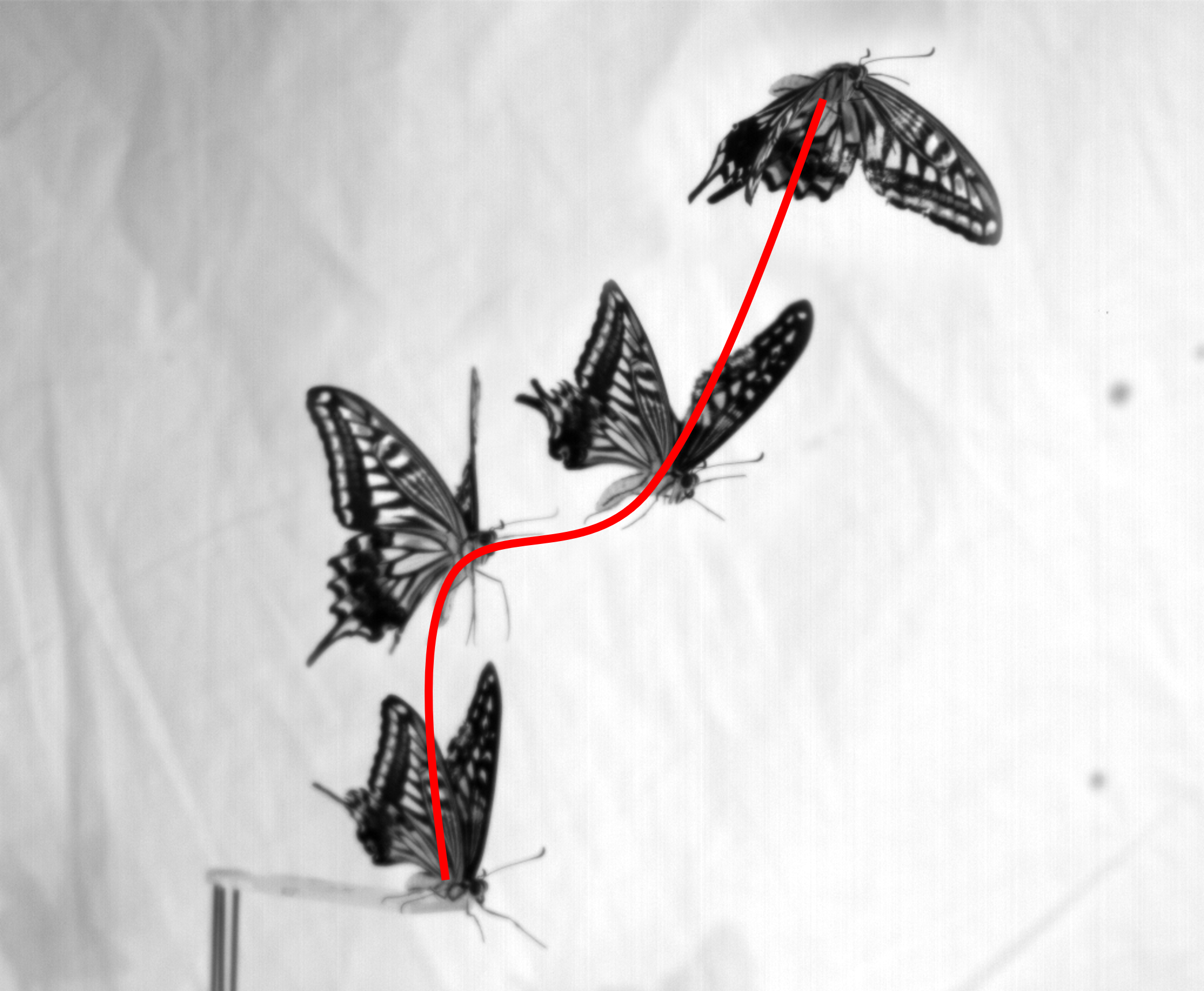
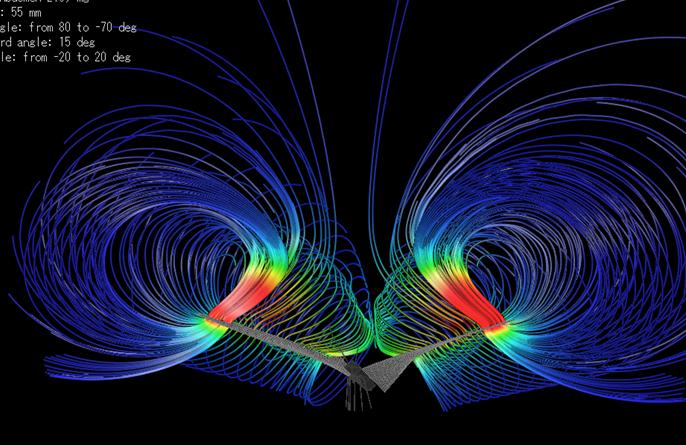
A butterfly with a low flapping frequency of 10Hz and wingspan of 10cm turns quickly, takes off over 10G, migrates a long distance despite of a few DOF wings. We are investigating the flapping motion using highspeed camera system, and analyzing the vortex around the wings by computational fluid dynamics (CFD), and fabricating the same scale model with 0.5g.


References
. Taro Fujikawa, Kazuaki Hirakawa, Shinnosuke Okuma, Takamasa Udagawa, Satoru Nakano, Koki Kikuchi, Development of a small flapping robot: Motion analysis during takeoff by numerical simulation and experiment , MECHANICAL SYSTEMS AND SIGNAL PROCESSING(MSSP), ELSEVIER, Vol.22, Issue 6, pp.1304-1315, (2008-8),
. YUTA OZAWA, TARO FUJIKAWA, KOKI KIKUCHI: ANALYSIS OF TURNING MOTION FOR DEVELOPING A BUTTERFLY-STYLE FLAPPING ROBOT,MM SCIENCE JOURNAL, MARCH 2018, pp.2198-2204.(Translated paper: Recommended by ICDES2017).
. Taro FUJIKAWA and Koki KIKUCHI: Development of a Butterfly-style Flapping Robot with a Posture Control Mechanism by Varying the Ratio of Down and Up Stoke Times,JSDE, J-STAGE (2019), Vol.54, No.3, pp.199-210, (Resubmitted paper from ICDES2017).
. Ayato HOSOI, Shinya SATO, Yuta OZAWA, Koki KIKUCHI, and Taro FUJIKAWA: A Study on Glide Characteristics of a Small Flapping Robot ,JSDE, J-STAGE (2019), Vol.54, No.4, pp.265-274, (Resubmitted paper from ICDES2017).