We are developing an aerial/aquatic robot as an alternative of a common drone with rotary wings. While a multi-copter must change the rotational velocity in the air or underwater because the water resistance is 800 times greater than that of the air, a flying fish swims underwater by swinging the tail fin and glides in the air by deploying the pectoral fin. On the other hand, while the former must control the attitude vertically for takeoff and landing, the latter must accelerate from almost 4 m/s to 20 m/s on water surface for takeoff. This motion getting the body out above the water surface and swinging the tail fin underwater is known as “taxiing”. We are analyzing it by computational fluid dynamics (CFD) considering gas-liquid two-phase flow and manufacturing the robot realizing this amazing technique.
Taxiing simulation:
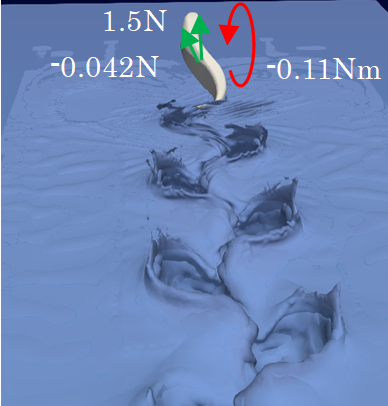
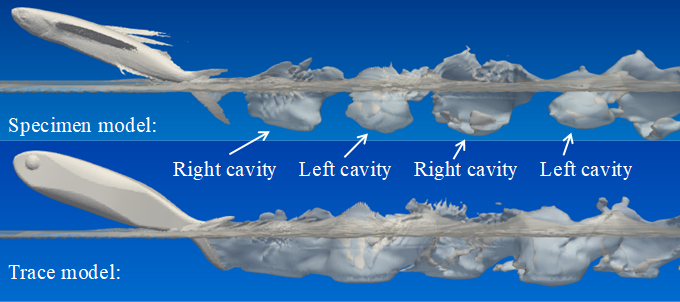
Taxiing motion by CFD simulation:
Model: Digital bio-specimen data, 20cm body length
Motion: Carangiform with 40Hz
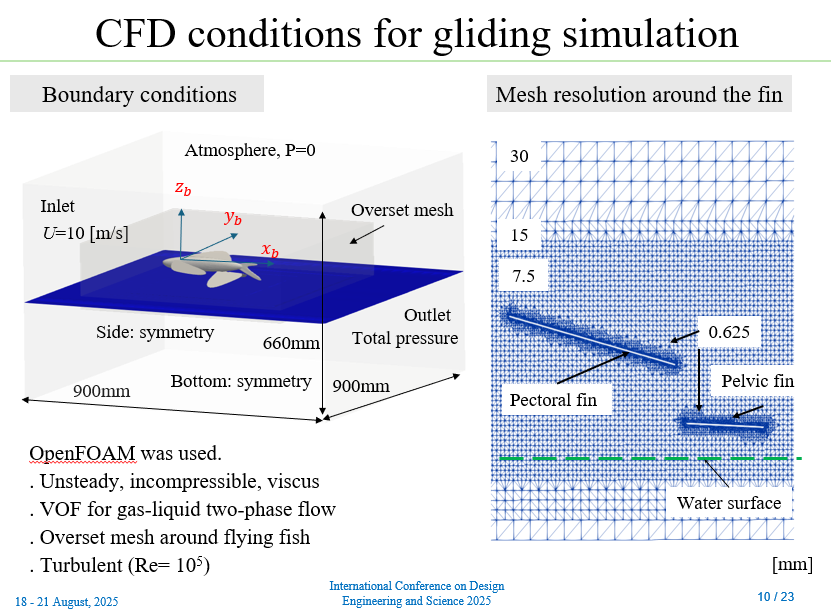
CFD: openFOAM, VOF, overset mesh, moving boundary condition
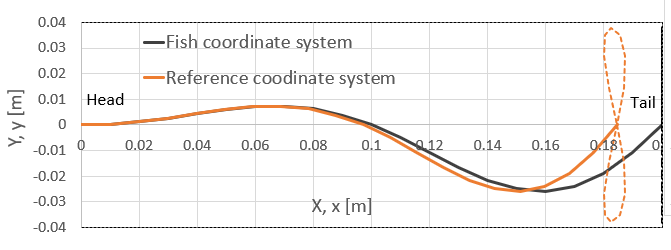
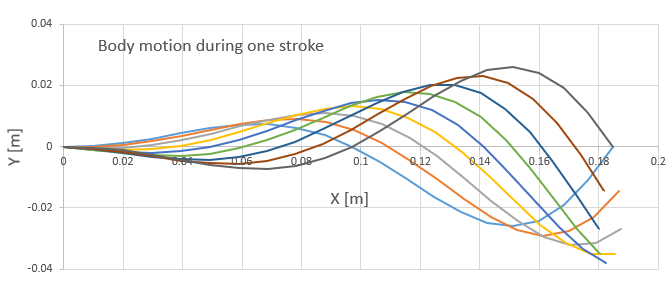
Carangiform with roll motion:
The amplitude of the body side (y) increases quadratically towards to the tail (x).
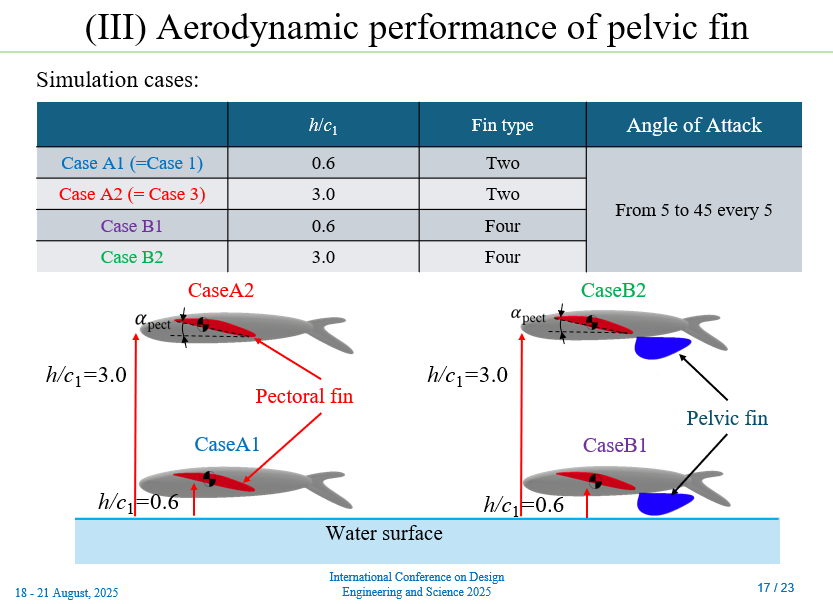
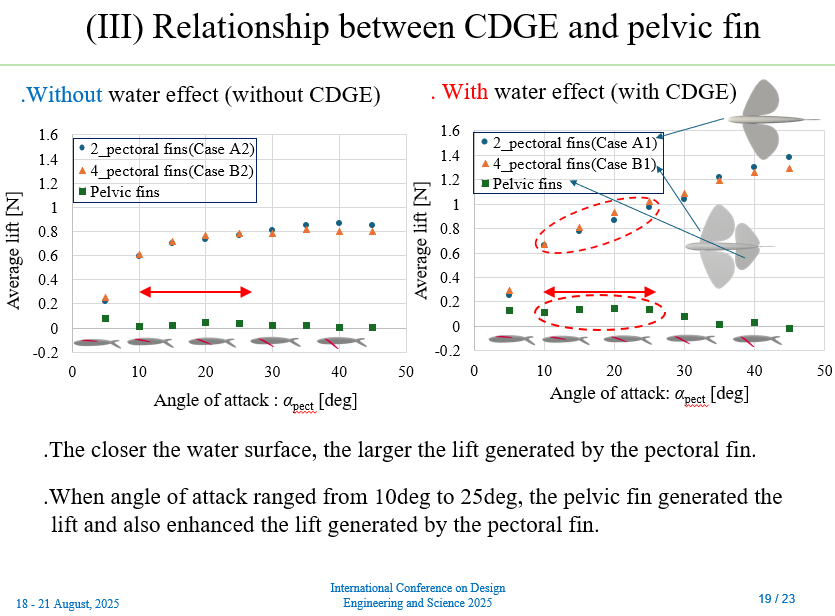
Ground Effect by Pelvic Fin (by Takazawa, 2025):
Jump on water:
Jump from the water surface by FSI simulation:
Model: multibody with 12 rigid bodies, body length of 20 cm,
Motion: Carangiform with 20Hz
CFD: openFOAM, VOF, overset mesh, moving boundary condition
Hardware:
Swim by Miyamoto model (2018):
References:
. Isamu NAKAJIMA and Koki KIKUCHI, Taxiing Simulation of a Flying Fish using a Digital 3D Biological Specimen, JSDE, 2023, (in Japanese).
. Takumi TAKAZAWA, Isamu NAKAJIMA, Kenta TSUKINO, Hideya REIZEN and Koki KIKUCHI, A study on an Aerial/Aquatic Locomotion Robot Based on Flying Fish (Aerodynamic Performance of Gliding with Pelvic Fins near the Water Surface), JSDE, The 6th International Conference on Design Engineering and Science: ICDES2025, (Aug. 2025), Alexandria Egypt.