To develop an insect-scale aerial/aquatic robot, we are investigating diving beetle’s swim, flight, and especially takeoff from water surface. Only a diving beetle, Eretes griseus, counteracts the surface tension and can take off directly from the water surface. For mm-scale insects, since the surface tension force may become 10 times greater than own weight, a diving beetle uses technically leg paddling, wing slapping, and clap-and-fling –the wing surfaces directly contact each other at stroke reversal and are peeled–. Additionally, the water surface effect with ripple or wave unlike ground effect, Meniscus wall break, foldable/deployable wings and protective forewings (Elytra) are attractive for small robots. A diving beetle never ceases to fascinate researchers like us.
Direct takeoff from the water surface:
Sutter speed: 1/1000 [s]
Frame per second: 1000
Resolution: 1280 * 1024 pixels

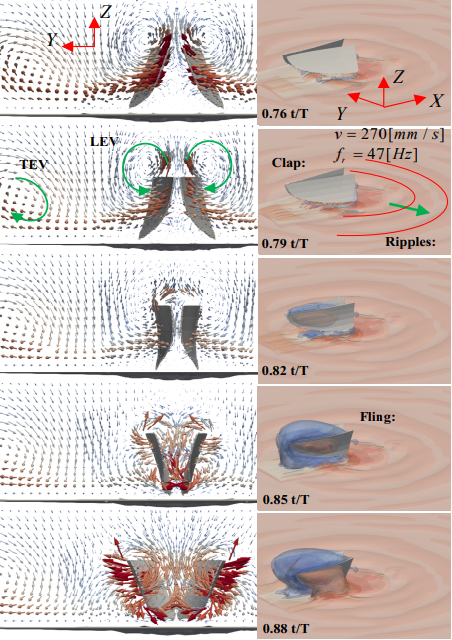
CFD simulation (Hashimoto 2023):
Velocity distribution (left) and pressure contour surfaces (right) during clap-and-fling near the water surface. The leading edge vortex (LEV) was strengthened by the flapping near the water surface and the wave expanded along with the wing motion.
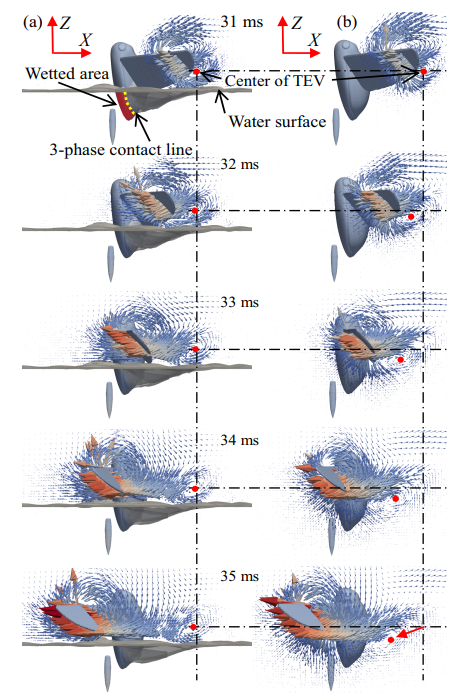
CFD simulation (Hashimoto 2023):
Comparison of velocity distributions on the 𝑌 = −13.5 mm plane: (a) near and (b) far from the water surface. Water surface level changed with wing motion, and subsequently the ground effect also changed. When the wing accelerated, the effect was prominent. The TEV stayed on the water surface in the condition that the water surface exists.
CFD: openFOAM(overInterDyMFoam), VOF, overset mesh, moving boundary condition,
Note that the dynamic contact angle algorithm was included.