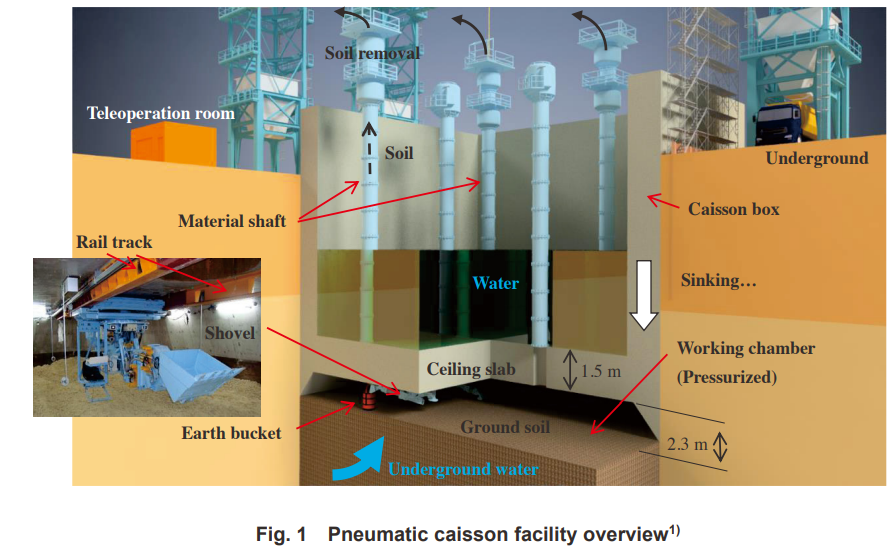
We are developing the automatic excavation system by caisson shovels operating in high air pressure and narrow underground space. Here, we implement the sensors into the caisson shovel with five DOFs to measure three rotary joint angles and two prismatic joint lengths and reproduce the trajectory of soil mountain removal by a skilled human operator. Additionally, we assess the trajectory tracking performance and the motion characteristics.
Collision Avoidance Simulations:
Potential method and geometric constraints (by Fukuda, 2025):
determine the shovel direction without collision based on the gradient.
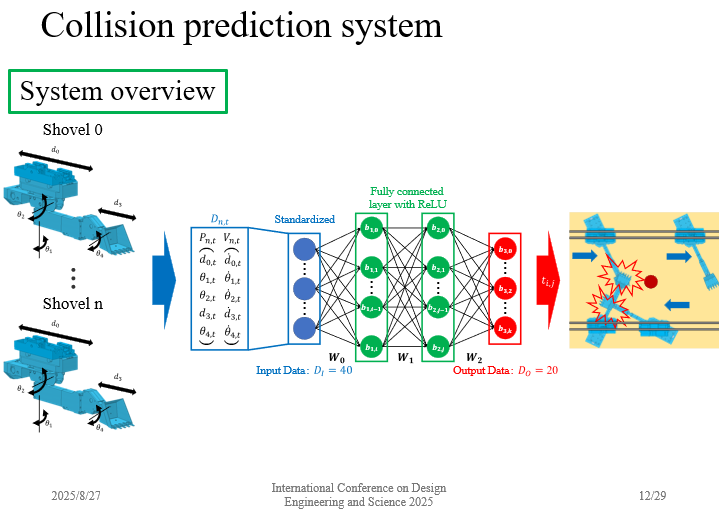
Deep learning (by Nagamine, 2025):
predicts the future collision time from the shovel motions.
Earth Bucket Recognition
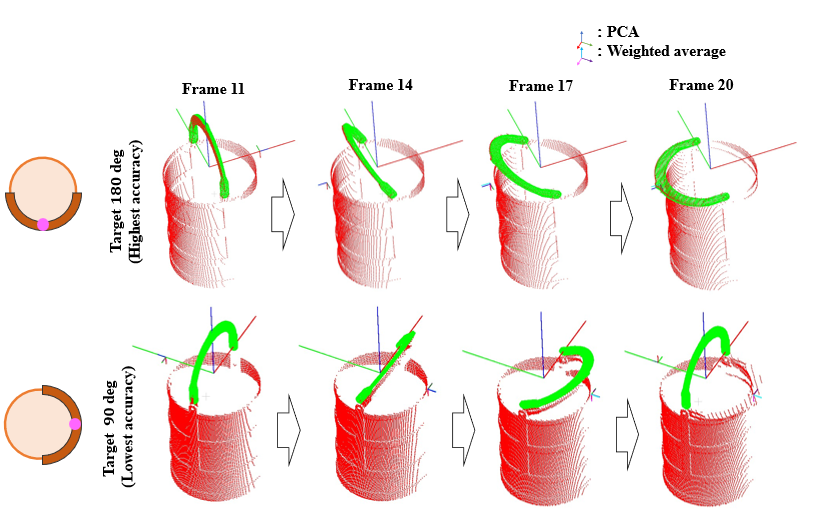
Earth bucket recognition method by RGBD camera (by Bato, 2025):
calculates the attitude based on point cloud processing, then predicts the handle angle, and finally determines the camera-invisible wire position.
References:
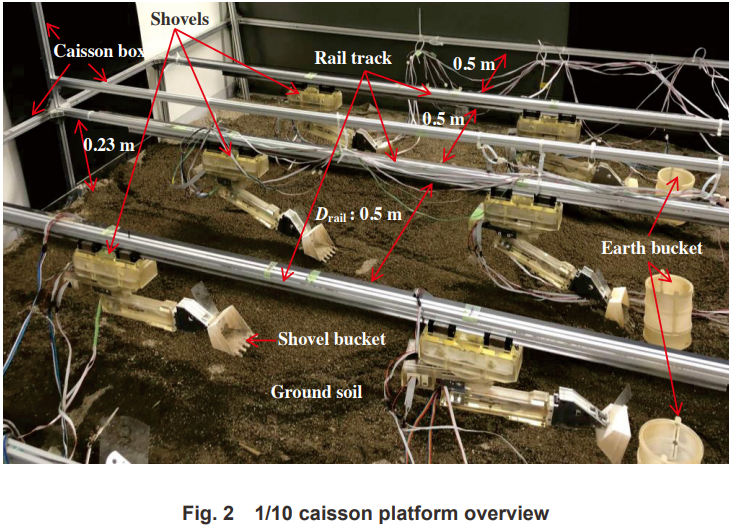
. Kazumasa TAKADA, Renato SATO, Shoma SATO, Morito ITO, Ryota TSUCHIYA, Koki KIKUCHI, Masahiro SHINDO, Akira KAMEI, and Toshihiro KONDO: Autonomous Operation System of Caisson Shovels in Narrow Underground Space at High Air Pressure (Development of a Job Scheduling Algorithm using a 1/10 Caisson Platform),JSDE, Vo.57, No.8, (2022), pp.381-396.
. Toshitaka TSUNEKI, Naoto NEGISHI, Ryota TSUCHIYA, Koki KIKUCHI, Toshihiro KONDO, Tetsuya KOYO, Akira KAMEI, and Keigo HAYAKAWA, A Study on Autonomous Operation System of Caisson Shovels in High Air Pressure and Narrow Underground Space (Development of a 1/10 Test Platform and the Demonstration), JSDE, The 4rd International Conference on Design Engineering and Science: ICDES2017, (Sep. 2017), Aachen, Germany.
. Akira KAMEI, Koki KIKUCHI, Tetsuya KOYO and Toshihiro KONDO, A Study on Autonomous Operation System of Caisson Shovels in High Air Pressure and Narrow Underground Space (Terrain Mapping by RGB- and Depth-sensing Camera Mounted on the Shovel), JSDE, The 4rd International Conference on Design Engineering and Science: ICDES2017, (Sep. 2017), Aachen, Germany.
. Taiki FUKUDA, Kenta OBATA, Riko BATO, Ryusei YAMAMOTO, Takuya NAGAMINE, Takuma KACHI, Koki KIKUCHI, Masahiro SHINDO, Masaki MATSUMURA, Yoshinao KURACHI and Akihisa IWASAKI, Autonomous Operation System of Caisson Shovels in Narrow Underground Space at High Air Pressure (Collision Avoidance Using Multiple Dynamic Potentials and Geometrical Constraints), JSDE, The 6th International Conference on Design Engineering and Science: ICDES2025, (Aug. 2025), Alexandria Egypt.
. Riko BATO, Kenta OBATA, Ryusei YAMAMOTO, Taiki FUKUDA, Takuya NAGAMINE, Takuma KACHI, Koki KIKUCHI, Masahiro SHINDO, Masaki MATSUMURA, Yoshinao KURACHI and Akihisa IWASAKI, Autonomous Operation System of Caisson Shovels in Narrow Underground Space at High Air Pressure (Pose Estimation of an Earth Bucket using 3D point cloud Data), JSDE, The 6th International Conference on Design Engineering and Science: ICDES2025, (Aug. 2025), Alexandria Egypt.
. Takuya NAGAMINE, Taiki FUKUDA, Kenta OBATA, Riko BATO, Ryusei YAMAMOTO, Takuma KACHI, Koki KIKUCHI, Masahiro SHINDO, Yoshinao KURACHI, Masaki MATUMURA and Akihisa IWASAKI, Autonomous Operation System of Caisson Shovels in Narrow Underground Space at High Air Pressure (Development of a Collision Prediction System using Machine Learning), JSDE, The 6th International Conference on Design Engineering and Science: ICDES2025, (Aug. 2025), Alexandria Egypt.
Links:
1)
Oriental Shiraishi Corporation: Pneumatic Caisson
3) i-Construction of Ministry of Land, Infrastructure, Transport and Tourism
Acknowledgement:
The part of this project was supported by an “R&D for Construction Technology” grant from the Ministry of Land, Infrastructure, Transport, and Tourism of Japan and a grant from the “Sentan Sangyo Souzou Project (Saitama Prefecture)”.