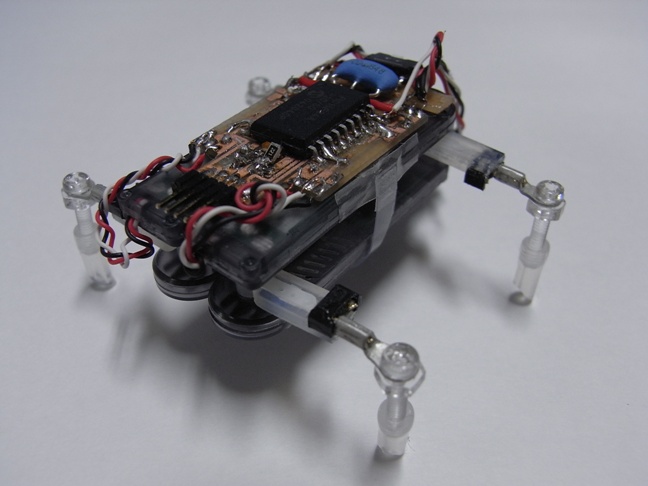
An Insect-scale Legged Robot
For an autonomous mobile robot, a world of cm-scale, i.e., a physical world in which insects play the lead, is intriguing.
A cockroach with body length of 3 cm and weight of 0.4g moves faster than 30 body lengths per second, a ladybird with body length of 1 cm and weight of 0.1 g vertically climbs a tree trunk and roves the back of the leaf upside down, a beetle with body length of 6 cm and weight of 10 g lifts up an obstacle far heavier than their own weight, a water strider with body length of 2 cm and weight of 0.1 g leaps on water, and a butterfly with body length of 5 cm and weight of 0.5 g takes off at the acceleration over 10 gravities.
The maneuverability of insects clearly keeps a distance from that of animals with m-scale. If the body length is 1/2, while the area is 1/4, the volume is 1/8.
By such scale effect, the surface force such as air resistance surpasses the volume force such as gravity in an insect-scale world.
Thus, their maneuverability increases exponentially, because the force to support their own weight against gravity is extremely reduced.
Meanwhile, from the viewpoint of mechatronics, the architecture, designed by an exoskeleton and a cheap control system realized by barely 10^5 to 10^6 neurons, is also very attractive. Usable devices are extremely limited, even though the progress of micro-electro-mechanical-system (MEMS) technology has enabled various ultra-small mechanical systems. Assuming that a CPU is approximately 0.4 g and a transmitter is 0.2 g (a CCD camera is approximately 1 g, if you need), an insect-scale robot may be the smallest for a feasible autonomous mobile robot.
From this point of view, we are creating attractive cm-scale locomotions and developing:
Related Papers:
.Mayo Funatsu, Yushi Kawasaki, Soichiro Kawasaki, Koki Kikuchi: DEVELOPMENT OF cm-SCALE WALL CLIMBING HEXAPOD ROBOT WITH CLAWS,MM (Modern Machinery) Science Journal, October 2014, pp.484-489, (2014), DOI: 10.17973/MMSJ.2014_10_201411.
.Soichiro Kawasaki and Koki KIKUCHI, Development of Legged Wall Climbing Robot using Passive Suction Cups, JSDE, The 3rd International Conference on Design Engineering and Science: ICDES2014, (Sep. 2014), Pilsen, Czech Republic, Vol.2, pp.112-116.
 Ground Running Robots
Ground Running Robots
 On-water Running Robots
On-water Running Robots
 Wall Climbing Robots
Wall Climbing Robots
 Jummping Robots
Jummping Robots
Meanwhile, from the viewpoint of mechatronics, the architecture, designed by an exoskeleton and a cheap control system realized by barely 10^5 to 10^6 neurons, is also very attractive. Usable devices are extremely limited, even though the progress of micro-electro-mechanical-system (MEMS) technology has enabled various ultra-small mechanical systems. Assuming that a CPU is approximately 0.4 g and a transmitter is 0.2 g (a CCD camera is approximately 1 g, if you need), an insect-scale robot may be the smallest for a feasible autonomous mobile robot.
From this point of view, we are creating attractive cm-scale locomotions and developing:
Related Papers:
.Mayo Funatsu, Yushi Kawasaki, Soichiro Kawasaki, Koki Kikuchi: DEVELOPMENT OF cm-SCALE WALL CLIMBING HEXAPOD ROBOT WITH CLAWS,MM (Modern Machinery) Science Journal, October 2014, pp.484-489, (2014), DOI: 10.17973/MMSJ.2014_10_201411.
.Soichiro Kawasaki and Koki KIKUCHI, Development of Legged Wall Climbing Robot using Passive Suction Cups, JSDE, The 3rd International Conference on Design Engineering and Science: ICDES2014, (Sep. 2014), Pilsen, Czech Republic, Vol.2, pp.112-116.
Ground Running Robots
On-water Running Robots
Wall Climbing Robots
Jummping Robots