▼小型壁面移動ロボット開発
壁面移動は,表面検査等において非常に重要な移動様式です.
本研究室では,主に小型移動ロボットのための壁面移動メカニズムとして,爪や吸盤による受動吸着を研究しています.
Kawasaki model (2011).
Kawasaki model (2013).
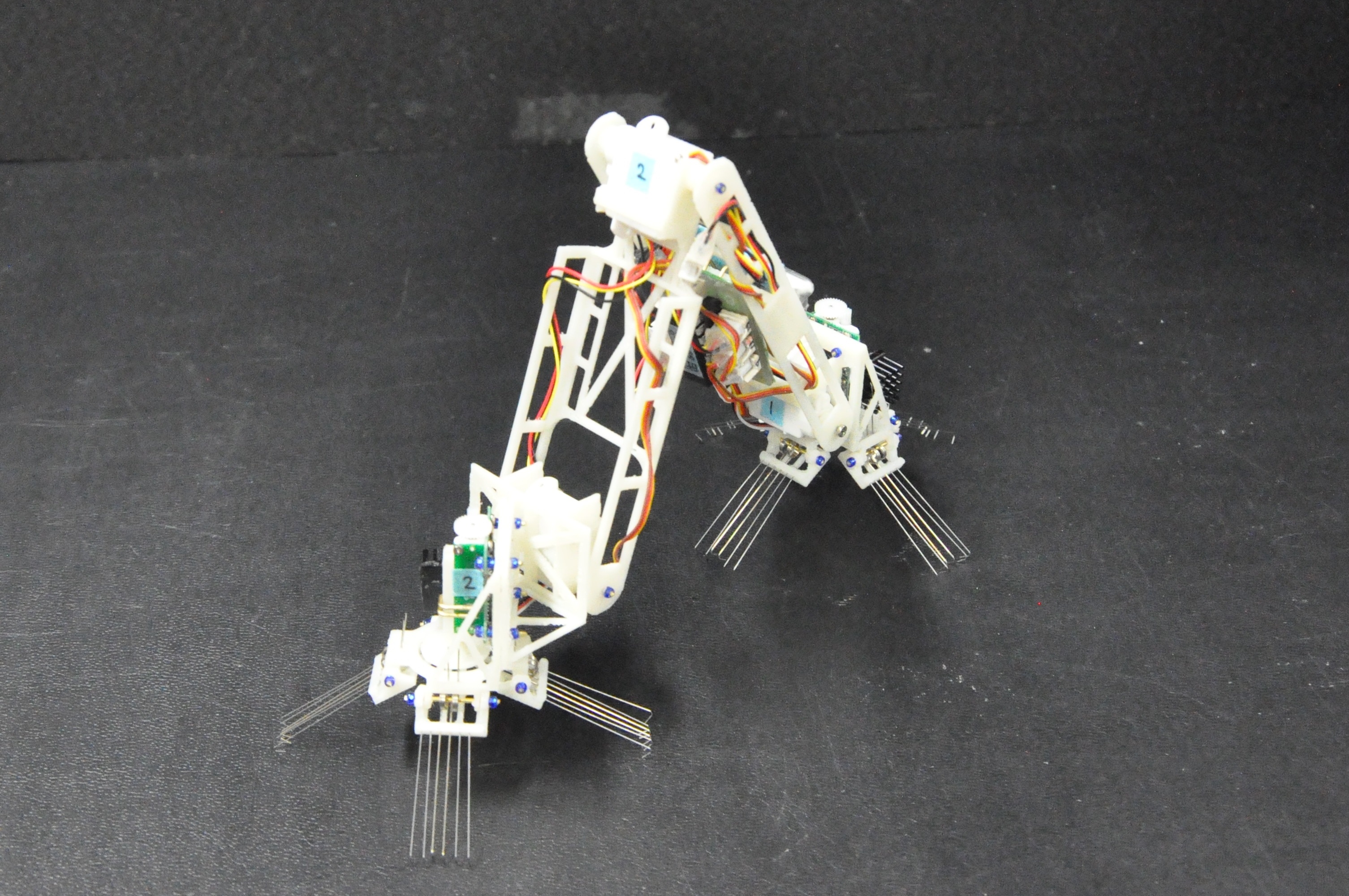
Kawasaki 2Go model (2014).
Funatsu model (2015).
Waku model (2011).
.jpg)
◆ Waku model (2011).
5.1 × 3.8 × 1.9 [cm]
8.1 g (バッテリー含む)
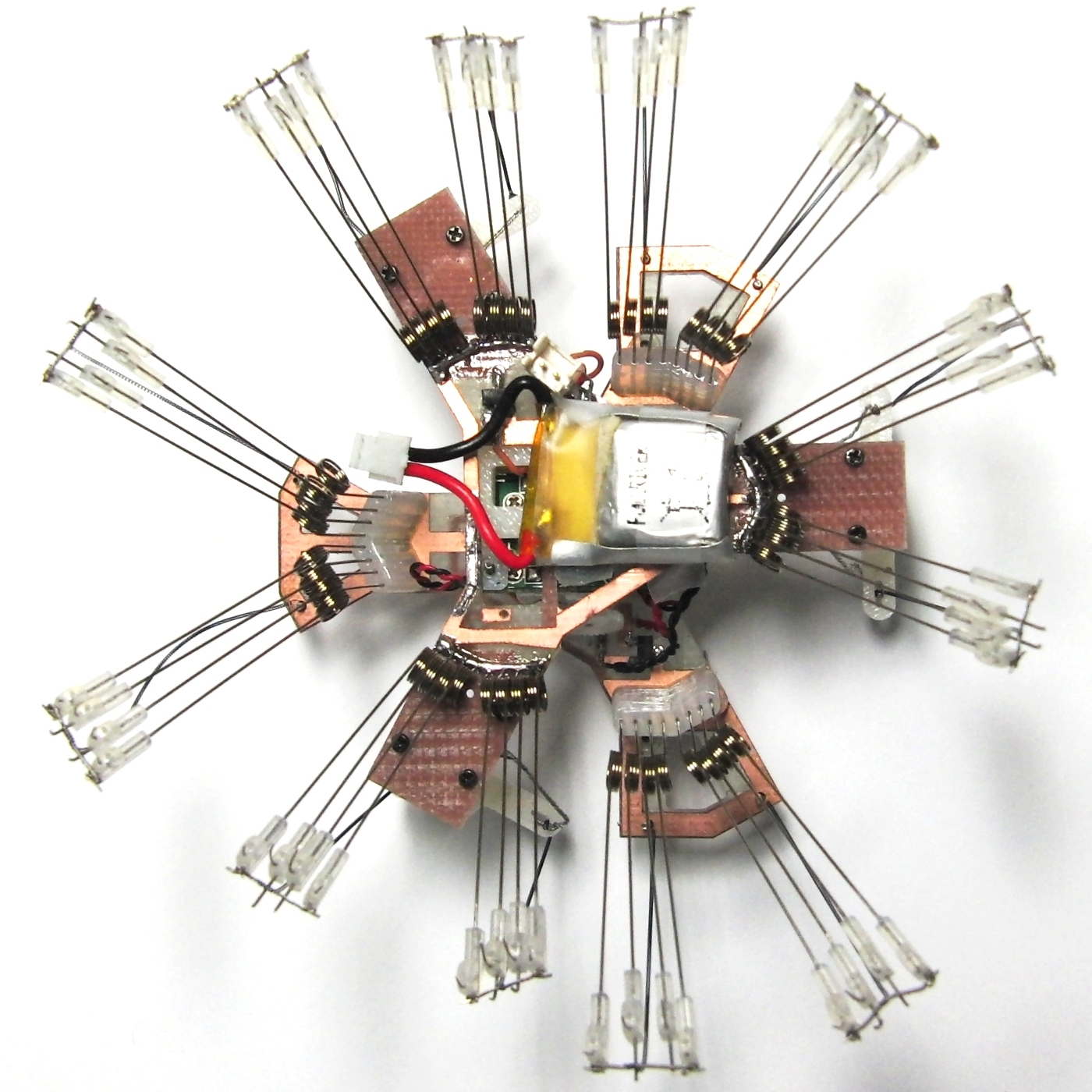
ロボットのアクチュエータには,出力質量比が高く,摩擦力を利用して駆動する超音波リニアアクチュエータ(ULA)を使用している. ULAは,圧電素子の振動を制御することにより移動体を微小移動させ,それを高速で繰り返すことによって直動運動を行うアクチュエータである.この直動運動によって,バネとワイヤーで構成された脚先を駆動し,爪による引っ掛け動作を行う.
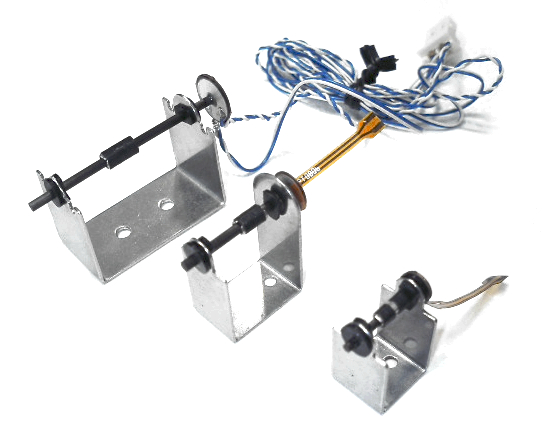
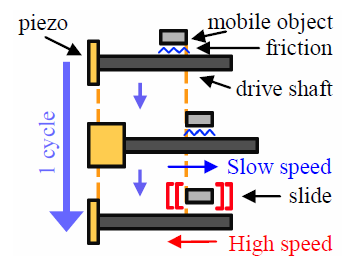
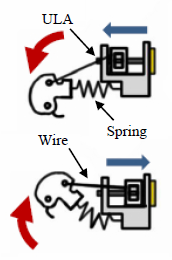
超音波リニアアクチュエータ(ULA) ULA駆動原理 脚先の動作原理
ロボットは上下二つのボディに分かれており,中央の直動サーボモータによってスライド動作を行う.上下ボディ共に各2本ずつ脚が取り付けられており,ボディ毎に遊脚・支持脚を切り替え,本体を引きずる形で移動する.また,ロボットは小型リチウムポリマーバッテリーを搭載することで,自律駆動を行うことが可能となっている.
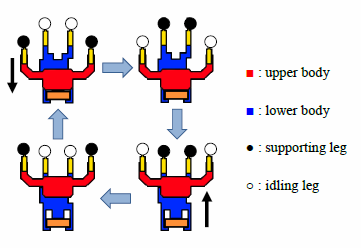
歩容方法 ボディのスライド動作
現在は麻布面において傾斜75 degの登攀を可能としており,今後は垂直な壁面の登攀を目指す.
br> 登攀の様子(傾斜75 deg)
ページトップへ戻る
Kawasaki model (2011).
.bmp)
◆Kawasaki model (2011).
6.7 × 5.4 × 2.3 [cm]
19.8 g (バッテリー含む)
ロボットのアクチュエータには小型直動サーボモータを使用し,各脚に上下方向と前後方向に2つずつ,全体で計8つの自由度を持たせている. 脚先の動作は脚の上下運動を行うサーボモータ(motor1)と連動しており,足首部分の回転運動によって爪の引っ掛け動作を行う. この際,左右の脚で壁面を掴み込むことで壁面に対して垂直な力に強くし,壁面移動中の剥離防止を行っている. 爪には直径0.6mmの真鍮線を使用し,先端部を約15 degの角度に削っている.ロボットはこの爪を各脚2本ずつ,計8本備えている. また,前後運動を行うサーボモータ(motor2)によって遊脚時に脚を前に出し,接地時に脚を引き寄せることで前進を行う.
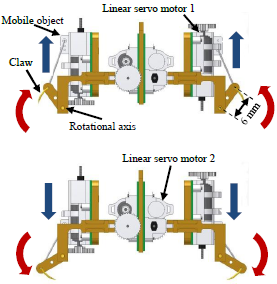
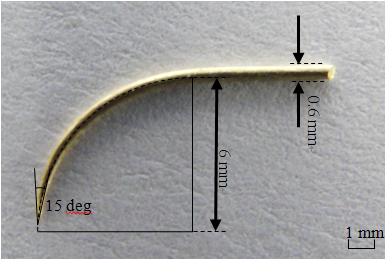
爪の動き ロボットの爪
現在,発泡スチロール面において傾斜60 degの昇降を可能としており,今後は垂直な壁面の昇降を目指す.
登攀の様子(傾斜60 deg) 下降の様子(傾斜60 deg)
ページトップへ戻る
Kawasaki model (2013).
◆Kawasaki model (2013).
8.5 × 8.5 × 3.5 [cm]
13.5 g (バッテリー含む)
コンクリート面登攀の様子(傾斜90 deg)
ページトップへ戻る
Kawasaki 2Go model (2014).
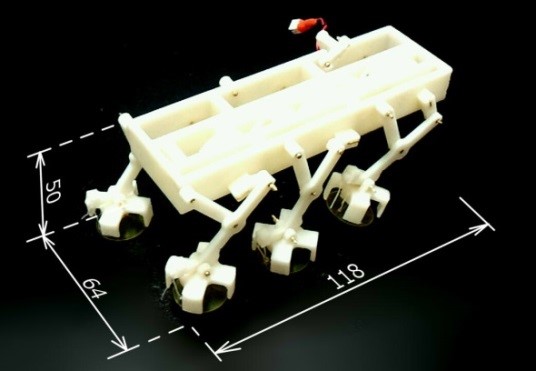
◆Kawasaki 2Go model (2014).
11.8 × 6.4 × 5.0 [cm]
34.0g
フラット面登攀の様子(傾斜90 deg)
ページトップへ戻る
Funatsu model (2015).
◆Funatsu model (2015).
16.5 × 7.6 × 8.7 [cm]
39.0g
コンクリート面登攀の様子(傾斜90 deg)
垂直面から水平面登攀の様子(傾斜90 to 0 deg)
ページトップへ戻る