▼シミュレーション
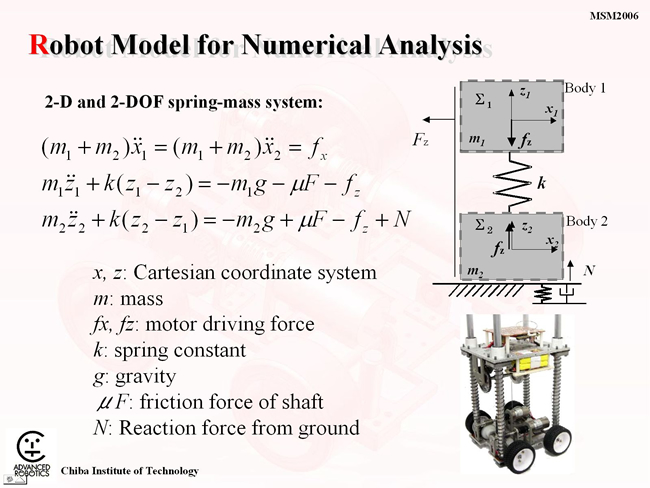 |
運動方程式: |
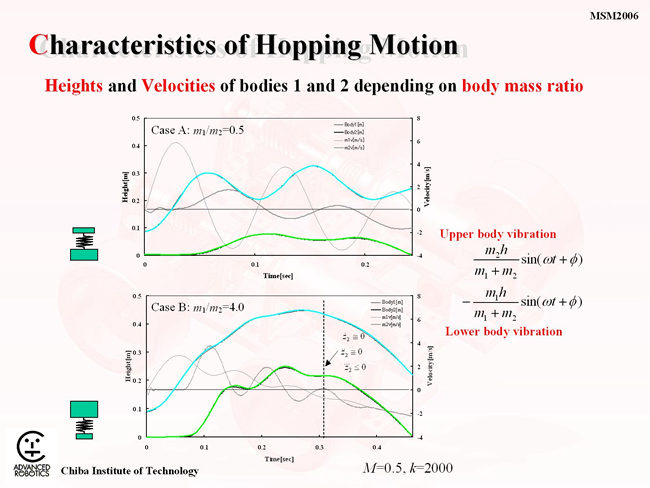 |
上下ボディの質量比と跳躍軌跡の関係: |
|
(換算質量0.5kg、バネ定数2000N/m、ばね伸縮量0.1m) |
| 左図: シミュレーションによる質量比0.25の跳躍例,右図: シミュレーションによる質量比4.0の跳躍例 |
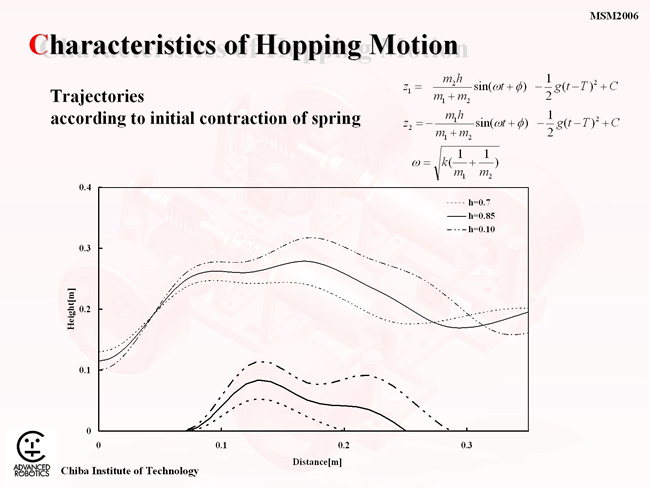 |
ばねの伸縮量と跳躍軌跡の関係: |
.Symmetry model
千葉工業大学 先進工学部 未来ロボティクス学科
KIKUCHI Laboratory: Chiba Institute of Technology, Faculty of Engineering,
|
運動方程式: |
|
上下ボディの質量比と跳躍軌跡の関係: |
|
(換算質量0.5kg、バネ定数2000N/m、ばね伸縮量0.1m) |
| 左図: シミュレーションによる質量比0.25の跳躍例,右図: シミュレーションによる質量比4.0の跳躍例 |
|
ばねの伸縮量と跳躍軌跡の関係: |