▼ジャンプロボット
 |
 |
|
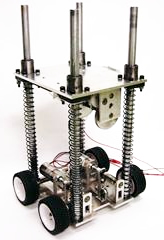
実機1号機(門倉バージョン) |
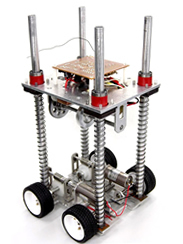
実機2号機(武士田バージョン) |
 |
 Justice |
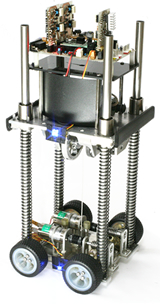
| 実機3号機(須藤バージョン) | 実機4号機 (坂口バージョン) |
 |
|
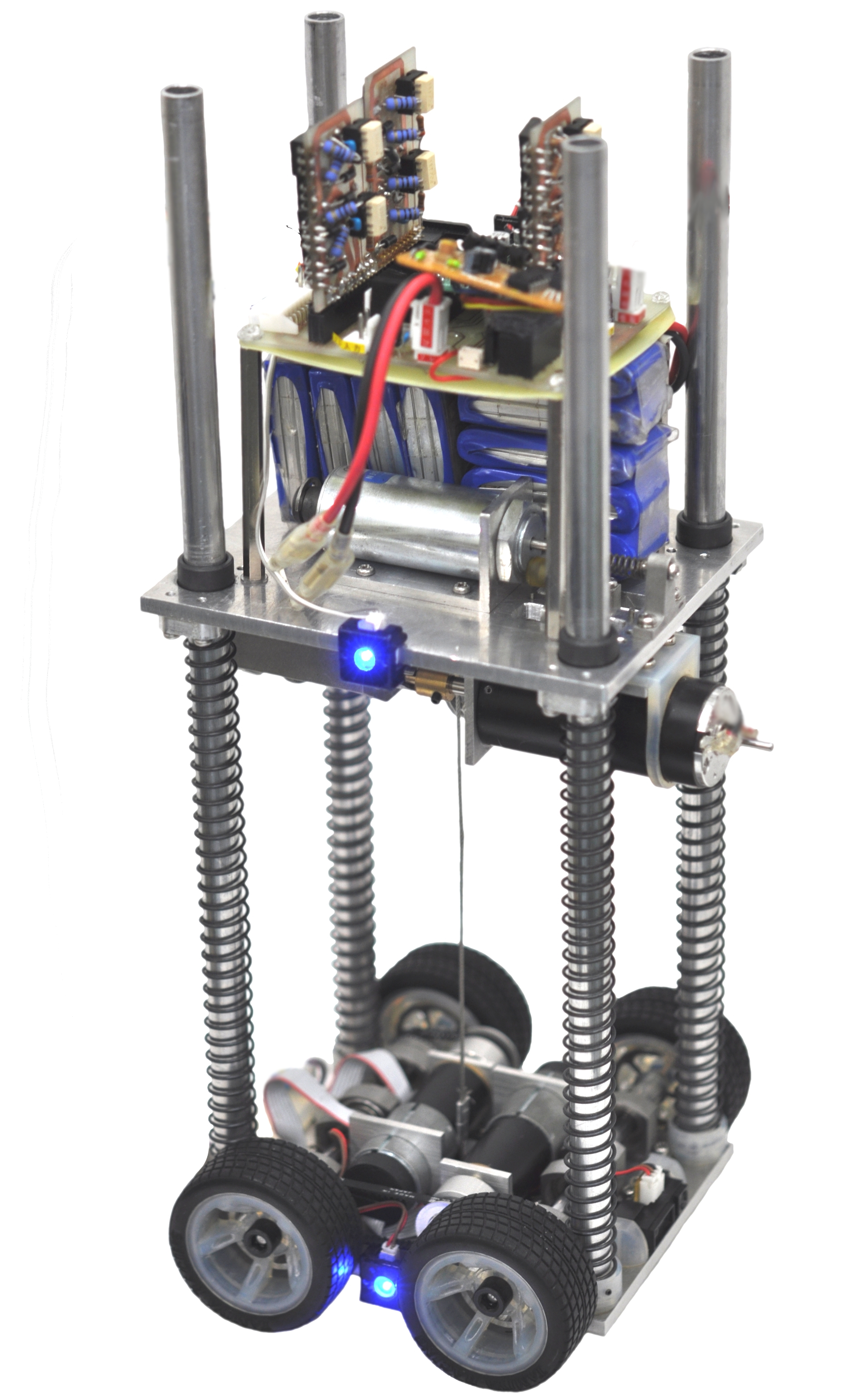
| 実機5号機(千葉バージョン) |
▼連続跳躍機構
 連続跳躍機構(Body1裏面) |
|
連続跳躍機構は,巻き取り機構とクラッチ機構から成る.巻取り機構は,巻き取りモータ,歯車減速機,巻き取りプーリ,
ワイヤガイドから構成されており,巻取りモータに電圧を印加することで巻取りプーリが回転し,ワイヤの巻き取りを行う. なお,ワイヤガイドは巻取りプーリの溝からワイヤが外れないようにするための機構である.クラッチ機構は,凹凸カップリ ング,スライドガイド,ソレノイド,復帰ばねから構成されており,ソレノイドに電圧の印加することで,巻 取りモータがスライ ドし,凹凸カップリングが分離することで,巻取りプーリが自由状態となる.さらに,ソレノイドへの電圧 の印加を終えると, 復帰ばねの弾性エネルギから巻取りモータがスライドし,凹凸カップリングが噛合う状態となる. |
▼制御回路
 制御回路(Body1表面) |
|
この制御回路は,無線機からの信号により制御プログラムがスタートすることで,
ロボットの移動や連続跳躍動作などを 自律的に行うことができる. |