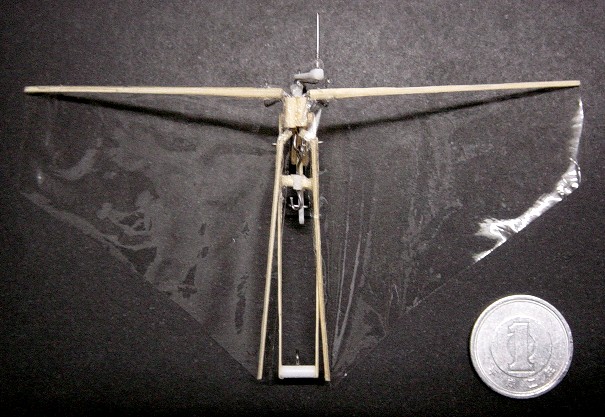
The wingspan and mass of our hardware almost correspond to those of a butterfly.
2004 model: mass of 0.85 g and flappinf frequency of 8 Hz
2005 free-flight model: mass of 0.69 g and flapping frequency of 16 Hz
2006 optical modeling type: mass of 1.5 g


2008 model: mass of 0.45 g

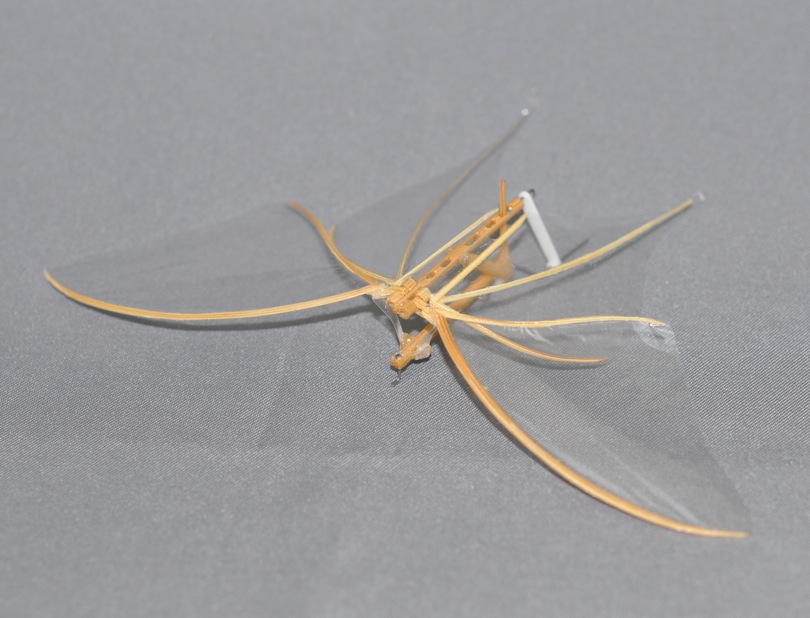
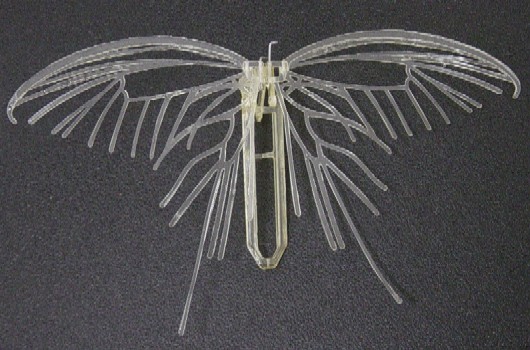
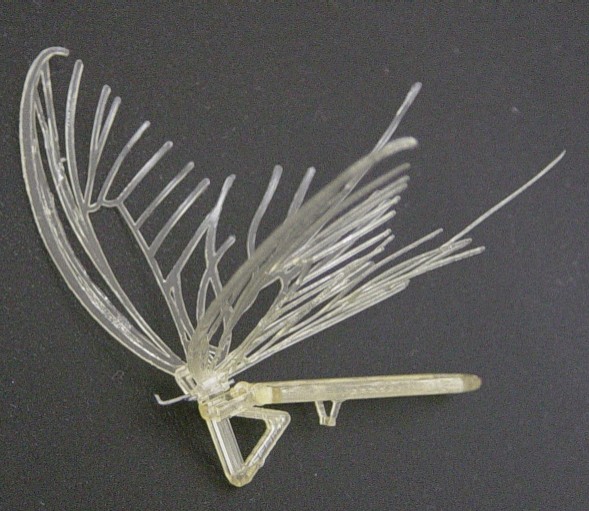
2008 four wing model: mass of 0.55g
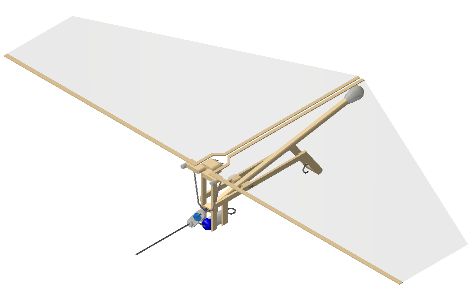
Lead-lag motion by elastic links
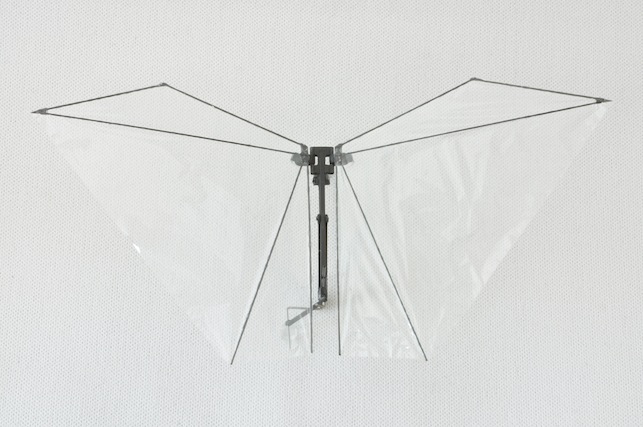
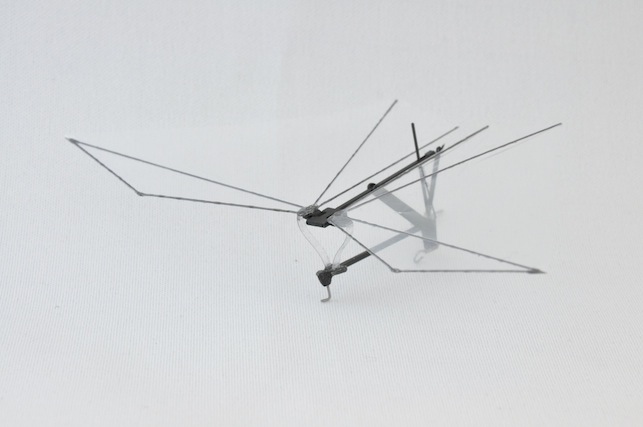
2010 two wing CFRP model: mass of 0.39 g
2014 two wing CFRP model: Takeoff
2015 four wing model: Glide