Autonomous Operation System using Caisson Shovel Robots
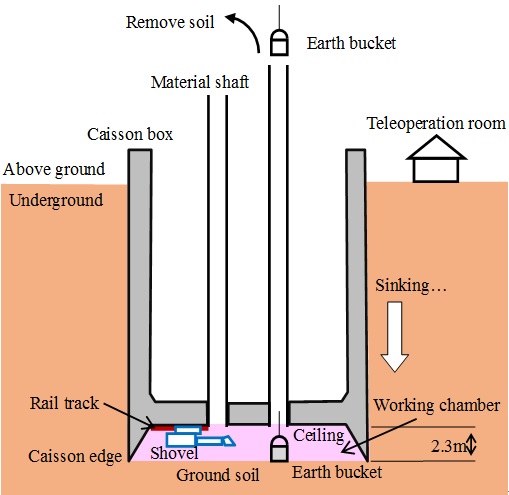
A pneumatic caisson method (PCM) is a pneumatic process for constructing a bridge foundation, underground retention basin, etc. The caisson shovel mounted on a rail track of a working chamber ceiling excavates the ground and immerses the steel reinforced concrete caisson box into the underground vertically. The inside of the working chamber is sealed and keeps high air pressure according to the underground depth to avoid the invasion of the underwater. From this reason, since the excavation surface is not submerged under the water, even on-water construction is possible. The maximum depth is almost 70m and 0.7MPa. The caisson shovel modeled as a link manipulator with five DOFs can be assembled and disassembled through the material shaft connecting to the working chamber and is teleoperated from an operation room above the ground through the images of the cameras mounted on the ceiling and the shovel. Although the teleoperated caisson shovel has ever solved many problems for safety, several issues and problems are still remained:
(1) the operators are lacking absolutely. In large construction area such as 70m*70m, for example, 30 caisson shovels need 30 human operators.
(2) The skilled operators are also lacking. The learning takes long time.
(3) The routine work such as soil mountain removal, i.e., even simple and easy task, binds the working hours of skilled operators.
(4) Since the 2D camera image for teleoperation limits the field of view and loses distance information, it deteriorates the excavation efficiency and poses the accidental collision.
From these reasons, although an unmanned construction system has been studied, PCM cannot adopt conventional system because of the following constraint conditions.
(C1) The large excavator cannot be used, since the equipment must pass through the material shaft with inside diameter of 1.08m to be assembled and disassembled in the sealed working chamber.
(C2) The machine utilizing a combustion engine cannot be used in the high air pressured and sealed working chamber.
These constraints hamper the realization of the unmanned construction system for PCM.
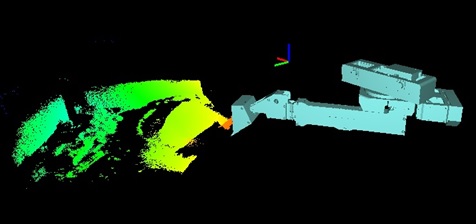
From this point of view, we develop the automatic excavation system by a caisson shovel operating in high air pressure and narrow underground space. Here, we implement the sensors into the caisson shovel with five DOFs to measure three rotary joint angles and two prismatic joint lengths and reproduce the trajectory of soil mountain removal by a skilled human operator. Additionally, we assess the trajectory tracking performance and the motion characteristics.
Related Papers:
.Akira KAMEI, Koki KIKUCHI, Tetsuya KOYO and Toshihiro KONDO, "A Study on Autonomous Operation System of Caisson Shovels in High Air Pressure and Narrow Underground Space (Terrain Mapping by RGB- and Depth-sensing Camera Mounted on the Shovel)", JSDE, The 4rd International Conference on Design Engineering and Science: ICDES2017, (Sep. 2017), Aachen, Germany.
.Toshitaka TSUNEKI, Naoto NEGISHI, Ryota TSUCHIYA, Koki KIKUCHI, Toshihiro KONDO, Tetsuya KOYO, Akira KAMEI, and Keigo HAYAKAWA, "A Study on Autonomous Operation System of Caisson Shovels in High Air Pressure and Narrow Underground Space (Development of a 1/10 Test Platform and the Demonstration)", JSDE, The 4rd International Conference on Design Engineering and Science: ICDES2017, (Sep. 2017), Aachen, Germany.
.Naoto NEGISHI, Toshitaka TSUNEKI, Koki KIKUCHI, Toshihiro KONDO, Tetsuya KOYO, Akira KAMEI, and Keigo HAYAKAWA, "A Study on Autonomous Operation System of Caisson Shovels in High Air Pressure and Narrow Underground Space (Demonstration of Trajectory Tracking Control)", JSDE, The 4rd International Conference on Design Engineering and Science: ICDES2017, (Sep. 2017), Aachen, Germany.
Links:
Oriental Shiraishi Corporation: Pneumatic Caisson
(1) the operators are lacking absolutely. In large construction area such as 70m*70m, for example, 30 caisson shovels need 30 human operators.
(2) The skilled operators are also lacking. The learning takes long time.
(3) The routine work such as soil mountain removal, i.e., even simple and easy task, binds the working hours of skilled operators.
(4) Since the 2D camera image for teleoperation limits the field of view and loses distance information, it deteriorates the excavation efficiency and poses the accidental collision.
From these reasons, although an unmanned construction system has been studied, PCM cannot adopt conventional system because of the following constraint conditions.
(C1) The large excavator cannot be used, since the equipment must pass through the material shaft with inside diameter of 1.08m to be assembled and disassembled in the sealed working chamber.
(C2) The machine utilizing a combustion engine cannot be used in the high air pressured and sealed working chamber.
These constraints hamper the realization of the unmanned construction system for PCM.
From this point of view, we develop the automatic excavation system by a caisson shovel operating in high air pressure and narrow underground space. Here, we implement the sensors into the caisson shovel with five DOFs to measure three rotary joint angles and two prismatic joint lengths and reproduce the trajectory of soil mountain removal by a skilled human operator. Additionally, we assess the trajectory tracking performance and the motion characteristics.
Related Papers:
.Akira KAMEI, Koki KIKUCHI, Tetsuya KOYO and Toshihiro KONDO, "A Study on Autonomous Operation System of Caisson Shovels in High Air Pressure and Narrow Underground Space (Terrain Mapping by RGB- and Depth-sensing Camera Mounted on the Shovel)", JSDE, The 4rd International Conference on Design Engineering and Science: ICDES2017, (Sep. 2017), Aachen, Germany.
.Toshitaka TSUNEKI, Naoto NEGISHI, Ryota TSUCHIYA, Koki KIKUCHI, Toshihiro KONDO, Tetsuya KOYO, Akira KAMEI, and Keigo HAYAKAWA, "A Study on Autonomous Operation System of Caisson Shovels in High Air Pressure and Narrow Underground Space (Development of a 1/10 Test Platform and the Demonstration)", JSDE, The 4rd International Conference on Design Engineering and Science: ICDES2017, (Sep. 2017), Aachen, Germany.
.Naoto NEGISHI, Toshitaka TSUNEKI, Koki KIKUCHI, Toshihiro KONDO, Tetsuya KOYO, Akira KAMEI, and Keigo HAYAKAWA, "A Study on Autonomous Operation System of Caisson Shovels in High Air Pressure and Narrow Underground Space (Demonstration of Trajectory Tracking Control)", JSDE, The 4rd International Conference on Design Engineering and Science: ICDES2017, (Sep. 2017), Aachen, Germany.
Links:
Oriental Shiraishi Corporation: Pneumatic Caisson